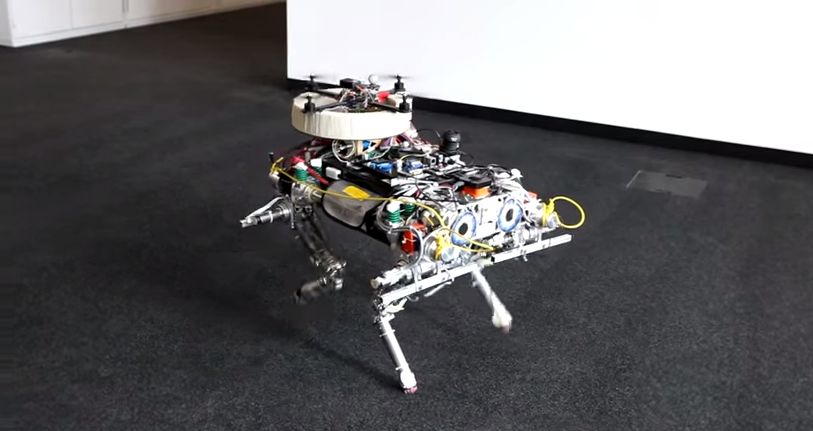
An entertaining video is out showing a dog-like quadruped with a tethered quadcopter moving along as a twosome. Just a few seconds into this video would seemingly be enough to inspire any animation whiz kid to come up with a buddy movie featuring a mad caper, where a toy airplane leashes itself on to a toy dog, but that is another story. The point here is that the four-legged robot and quadcopter are cooperating in moving along and the robot enables the flying machine to land safely on the robot's back.
This pair is part of a research venture at the Legged Robots Autonomous Systems Lab, ETH Zurich. The legged robot is StarIETH. This is a robot that can autonomously walk, climb and run over any terrain. The "Starl" portion stands for the Springy Tetrapod with Articulated Robotic Legs.
According to its creators, this is an advanced electrically actuated four-legged robot that can walk, climb and even run across challenging terrain.
Last year in Wired, Jeremy Kingsley called out some special points about StarlETH's legs: They can mimic how muscles store, release and transfer energy.
"With fine control of its movement," he wrote, "it handles rough terrain and responds well to external disturbances—crouching and shifting its body towards a gust of wind or counteracting a swinging motion. Unlike other quadrupeds, StarlETH uses electric motors instead of bulky hydraulics—so it's sleek and nimble (40cm tall and 26kg). Although other quadrupeds excel in select areas, StarlETH tries to have it all—energy efficiency, versatility, speed and robustness."
The RAMlab (Robotics and Motion Laboratory) at the University of Michigan described StarlETH as a quadrupedal platform with 12 actuated degrees of freedom, which are all driven by series elastic actuators. The robot is able to perform its gaits with on board energy supply and computation. Different gaits include bounding, trotting and running.
Other than serving up inspiration for a G-rated animation blockbuster, what can this video demo tell us about potential applications? Kelsey D. Atherton in Popular Science said, "It's easy to see how this could be turned to rescue work: a powerful dogbot walker could crawl over rubble into a collapsed building, and then once inside a building release a quadcopter from its back to explore difficult-to-reach places."
As such, the quadruped-quadcopter pair seem to align with the Autonomous Systems Lab's mission statement. "Our mission and dedication is to create robots and intelligent systems that are able to autonomously operate in complex and diverse environments. We are interested in the mechatronic design and control of systems that autonomously adapt to different situations and cope with our uncertain and dynamic daily environment."
© 2015 Tech Xplore





















