The news from ETH Zurich is upbeat over work in methods and techniques for robotic aerial construction—in other words, what if we could build structures with flying machines? The title of the project is fittingly called the Aerial Construction Project. ETH Zurich is never afraid of accepting a task where disciplines cross one another, in this instance, architecture and dynamic systems and control.
The latter (Institute for Dynamic Systems and Control) focuses on physical human-quadrocopter interactions and contact with the environment; and aerial assembly of tensile structures.
So what did these flying machines create? Imagine that—a rope bridge strong enough for a human to walk on, as was demonstrated in their video. "Eventually, a rope bridge that can support the crossing of a person was assembled by quadrocopters," they reported.
Except for the metal scaffolding at either end of the structure, the bridge itself consists exclusively of Dyneema rope. They said Dyneema is a material with a low weight-to-strength ratio; in turn it is considered as suitable for aerial construction.
The ETH team consider this project important as a step in the direction of robotic aerial construction at a level where the small flying machines are proving capable of realizing load-bearing structures at full scale. The team in turn is taking the effort closer toward real-world scenarios.
"Spanning 7.4 m between two scaffolding structures, the bridge consists of nine rope segments for a total rope length of about 120 m and is composed of different elements, such as knots, links, and braid ."
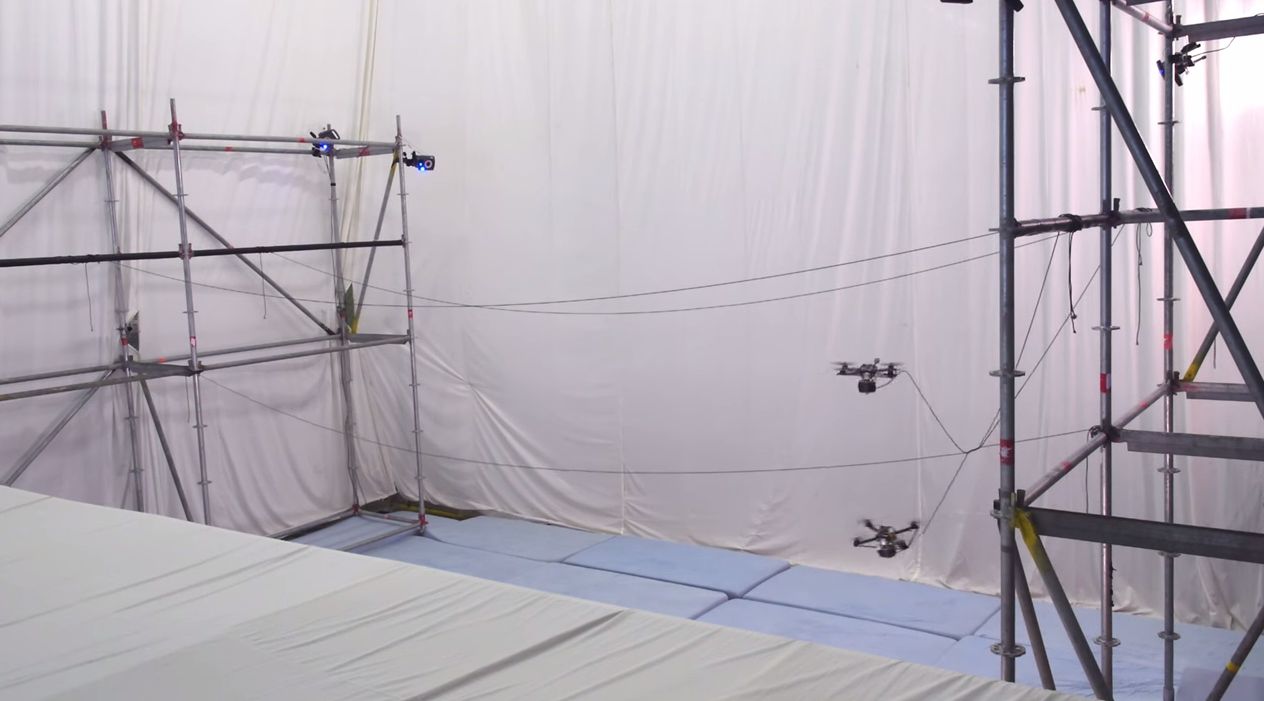
What about the drones? The vehicles have a motorized spool that allows them to control the tension of the rope during deployment. A plastic tube guides the rope to the release point located between two propellers. External forces and torques exerted on the quadrocopter by the rope in the course of deployment are estimated and taken into account to achieve compliant flight behavior.
The project is carried out at the Flying Machine Arena, a space devoted to autonomous flight.
Robohub provided some details about the bridge-building process: "An offboard computer runs the algorithms and sends commands out to the flying machines via a customized wireless infrastructure. Before construction begins, the location of the scaffolding is measured and input to the system. Once the anchor point locations for the rope are known, all the connections and links of the bridge's primary and bracing sections are—without human intervention—autonomously woven and secured into place by the quadrocopters, which are each equipped with a motorized spool that allows them to control the tension of the rope."
More information: www.idsc.ethz.ch/research-dand … al-construction.html
© 2015 Tech Xplore





















