February 16, 2017 report
A way to magnetically control individual members of a robot swarm

(Tech Xplore)—A trio of researchers with Philips Innovative Technologies in Germany has developed a way to magnetically control individual members of a robot swarm. In their paper published in the journal Science Robotics, Jürgen Rahmer, Christian Stehning and Bernhard Gleich describe their approach and the ways they believe it could be used in practical applications.
Scientists have demonstrated that it is possible to control a swarm of tiny robots (or micromachines) using a magnet, which has proven useful for some applications such as tiny robots that do not have their own power source—they are instead moved by the magnetic field. The next step is to allow a human controller (or computer) to direct the movements of individual group members.
Such a swarm could be directed inside of a sick patient, for example, to attack a tumor—each member would be moved to the tumor and then activated independently so that non-tumorous tissue would not be harmed. The difficulty of the problem is due, of course, to the influence of a magnetic field—it works the same way on all of the swarm members, which makes them all move and behave in the same ways. In this new effort, the researchers have shown that that does not necessarily have to be the case.
To manipulate individual members of a group of tiny robots, the researchers used a magnetic field to keep groups of small magnetic screws frozen in place. They then took advantage of the fact that those screws that resided in weak spots within the strong magnetic field could be moved by another weak magnetic source—overlaying a relatively weak rotating magnetic field, for example, could make free screws spin. In practice, this amounted to placing magnets inside of cylinders and attaching them to the screws. Individual screws could then be made to turn by applying a weak field from a paired coiled device.
The group demonstrated the idea by building a Lego-looking man with arms, legs and neck that could each be moved independently at will. They note that another application of an independently manipulated swarm could be medical implants caused to change in shape as time passes and a patient heals.
-
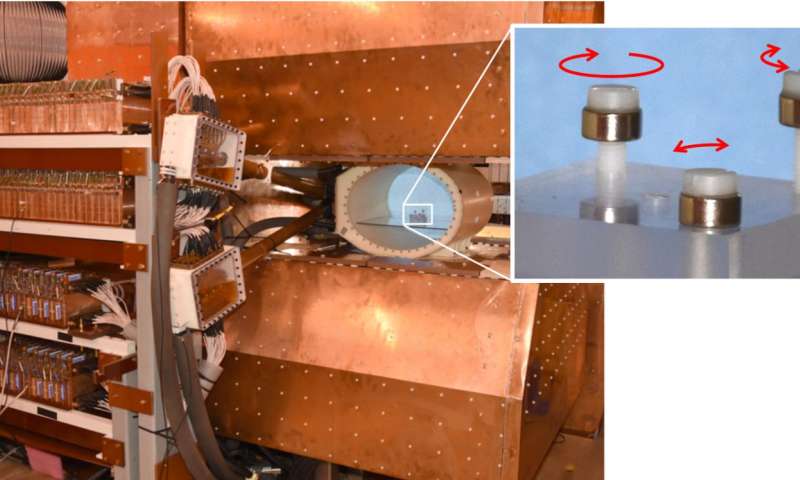
The powerful magnetic field generator with copper shielding and high-frequency coils. Credit: J. Rahmer and B. Gleich, Philips Research, 2017 -
Lego bot performing jumping jacks with limbs connected to magnetic screws that can each move independently without influencing surrounding magnets. Credit: J. Rahmer and B. Gleich, Philips Research, 2017 -
“Ghostly” screws: each completes a spin on its own. Credit: J. Rahmer and B. Gleich, Philips Research, 2017
More information: Jürgen Rahmer et al. Spatially selective remote magnetic actuation of identical helical micromachines, Science Robotics (2017). DOI: 10.1126/scirobotics.aal2845
Abstract
Magnetic micromachines can be controlled remotely inside the human body by application of external magnetic fields, making them promising candidates for minimally invasive local therapy delivery. For many therapeutic scenarios, a large team of micromachines is required, but a convincing approach for controlling individual team members is currently missing. We present a method for selective control of identical helical micromachines based on their spatial position. The micromachines are operated by uniform rotating fields, whereas spatial selection is achieved by application of a strong field gradient that locks all machines except those located inside a small movable volume. We deliver experimental evidence of three-dimensional selective actuation with a spatial selectivity on the order of millimeters over a workspace large enough for clinical applications. Selective control of teams of helical micromachines may improve minimally invasive therapeutic approaches and may lead to more flexible local drug delivery systems or adaptive medical implants. As an example, we propose a concept for adaptive radiation treatment in cancer therapy based on selective switching of radioactive sources distributed inside a tumor.
© 2017 Tech Xplore
















