Well, each to his own taste. Kittens making friends with balls of yarn are absolute magnets for video surfers but a rival army of video clicksters can never max out staring at humanoids navigating where they want to go.
The latest video showcasing humanoid robots on the move is impressing viewers with the deft and successful way they are navigating a cinder block maze.
The video on the latter is IHMC, the Institute for Human and Machine Cognition (IHMC).
"To walk through a cluttered and complicated environment," said the team, legged robots need to figure out where they can put their feet. Added challenge: This needs to be done quickly, whether the terrain is flat or complex.
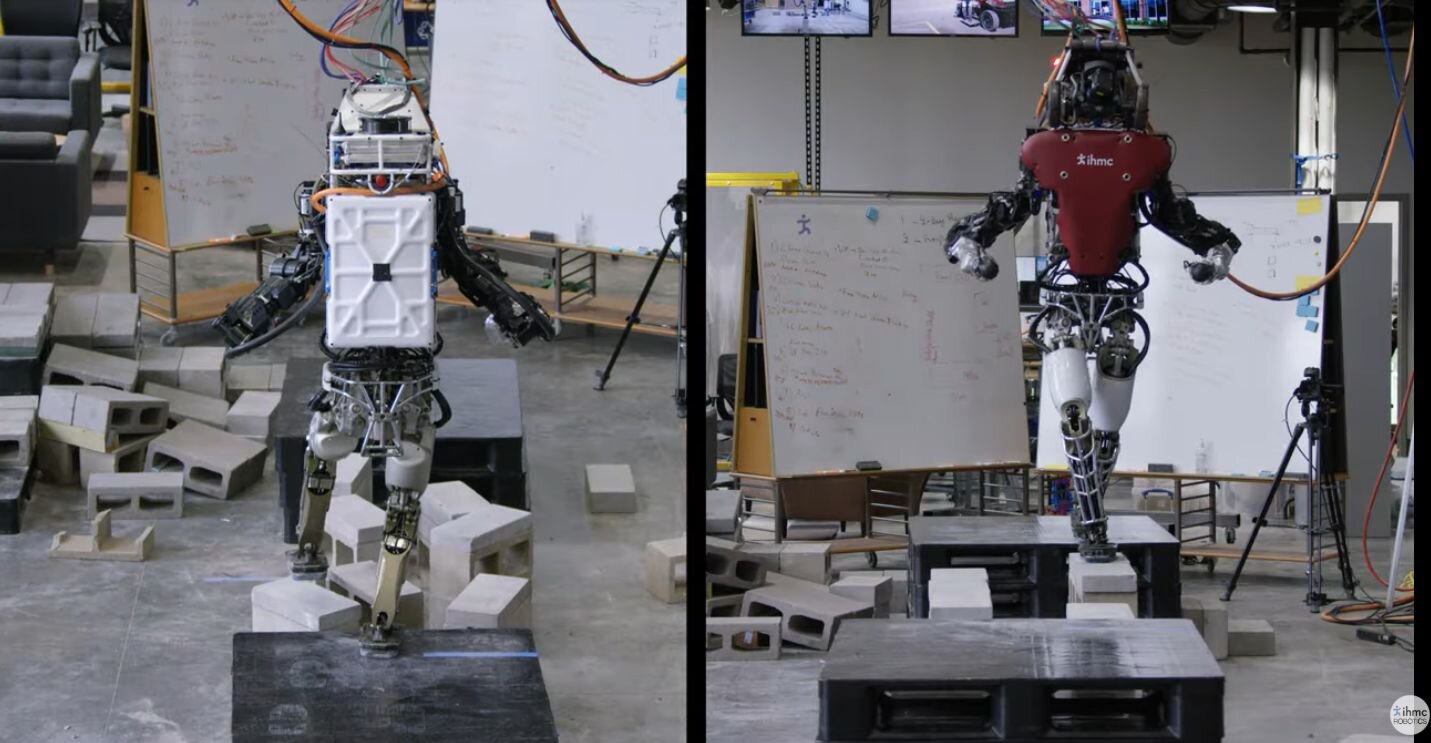
IHMC's autonomous footstep planning program is at work on both Boston Dynamics' robot, and NASA-developed Valkyrie.
The team used the two robots, the Atlas (Boston Dynamics) and the Valkyrie (NASA Johnson Space Center) for the most recent showcase. Another key feature was its 'head.'
"The method uses the machines' sensors to work out the most efficient path to a human-selected location," said TNW.
"In this video," the narrator said, "we use the Carnegie Robotics MultiSense SL head to generate point cloud of the environment. By segmenting this point cloud into planar regions, we represent the huge amount of data coming from the perception sensors in a much more compact form."
They further decomposed these planar regions into a collection-of polygons. Engadget: "Each section is then interpreted into a series of polygons to create a model of the environment, so the robot can plan out each of its steps to get from its starting point to its goal."
The IHMC team, during the DARPA challenge, had previously used the Atlas robot. An operator directed Atlas. Footsteps were placed in the interface. The process was slow and placed a burden on the operator. Another downside was that their placing individual footsteps was error-prone. Atlas fell down on the first day of the finals competition.
This time around, to circumvent human error, the new system let an operator select the desired location, said TNW, "but ultimately relies on an algorithm to figure out how to get the robot there and avoid obstacles."
"Basically, IHMC manages these complex navigation operations by specifying a beginning and end point for the robot," said Darrell Etherington in TechCrunch, "and then mapping all possible paths on a footstep-by-footstep basis, evaluating the cost of each and ultimately arriving at a best possible path—all of which can occur relatively quickly on modern hardware."
In one video scene of testing it shows the team having the robot walk across a set of cinder blocks, where there are only a few footholds that are possible. They can also plan paths where the robot has no choice but to only use partial footholds.
Currently, they said in their video notes, narrow terrain has a success rate of about 50 percent, rough terrain is about 90 percent, whereas flat ground is near 100 percent.
Pittsburgh, Pennsylvania based Carnegie Robotics, meanwhile, is a provider of advanced robotics sensors and platforms. The original MultiSense SL had been a sensor of choice for Atlas humanoid robots in the DARPA Robotics Challenge (DRC). As the humanoid head, the SL provided the majority of perceptual data used for teleoperation as well as automated control.
What's next?
"We plan on increasing planner speed and the ability to plan through mazes and to unseen goals," they said in the video notes.
It' s clear that the team is continuing attempts to conquer bipedal walking.
IHMC team stated as much.
"Our humanoid projects are focused on pushing our bipedal humanoids capabilities forward to handle rough terrain without any knowledge of the environment from onboard sensors...We are also focusing on the ability to robustly handle external disturbances. Our goal is to tackle increasingly more difficult walking challenges."
The video and paper were submitted to Humanoids 2019 - International Conference on Humanoid Robots event to take place later this year.
© 2019 Science X Network























