Researchers develop interface for underwater robotic equipment
A research team from the Interactive and Robotic Systems Laboratory at the Universitat Jaume I in Castelló has developed software that allows underwater robots with manipulation capabilities to be controlled remotely in a more efficient way, as it offers a computer graphic interface and prior realistic simulation. The new technology amends, in the context of underwater scenarios, the lack of simulation systems and realistic 3D interfaces that enable remote control of tasks in autonomous and teleoperated mobile manipulator robots.
The use of robots in hazardous scenarios is indispensable, especially in situations caused by accidents, fire, smoke, radiation or deep water, which are almost impossible to access in person. The new software enriches the reality received from the robot located in the hazardous environment and unifies it with 3D information extracted by artificial intelligence techniques. This results in a mixed reality that is very useful for users.
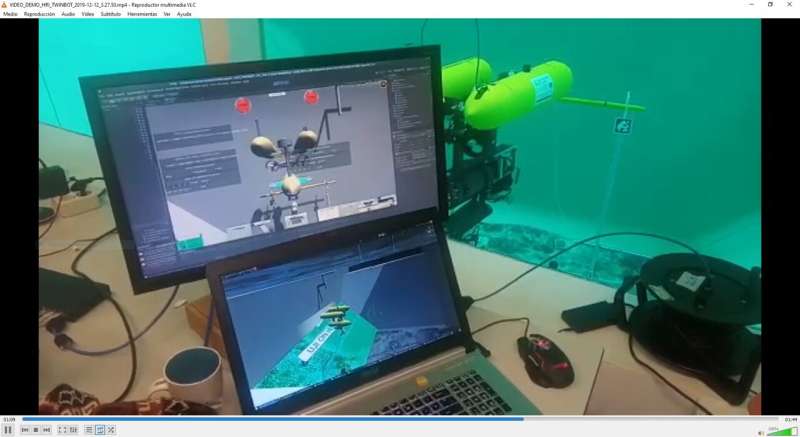
The system makes it possible to represent the state of the robots in the 3D environment by obtaining real data regarding the position of the vehicle and the manipulator arm, as well as the information received from cameras and sensors. The user interface incorporates a realistic simulation system to experiment with robot functions and simulated telemetry before interacting with the real systems. This allows for greater efficiency in the tasks performed by the robot, ensuring people's safety in such situations.
The new software makes it possible to achieve underwater robots capable of manipulating, obeying the orders of the human operator and simulating the effects of robotic actions before they occur; at the same time, it enriches the information offered to the user, favors the supervision of the task and improves the safety of the interventions. One of its advantages is that it offers greater precision in the manipulation and control of robots in adverse or dangerous scenarios.
The main sectors that can benefit from this new technology are those linked to cooperative robotics (e.g. industry 4.0), underwater, radioactive or hazardous environments for human health due to fire and smoke, as well as security and telecommunications research. The research team is seeking specific agreements and subsequent licensing agreements with companies for the development and adaptation of the technology to specific applications.
The development of this user interface has been carried out during the execution of the TWINBOT project and has been validated in real conditions (with two G500 vehicles) at the Centre for Research in Robotics and Underwater Technologies of the Universitat Jaume I of Castelló (CIRTESU). The software has also been improved and adapted to industrial and hospital environments during the first year of the European project H2020-El-Peacetolero.




















