
A video showing "multimodal locomotion in a bioinspired robot" has been making the rounds, and the video demonstrates advances in robotics as scientific tools as well as potential robots for search and rescue operations. Its name is Pleurobot.
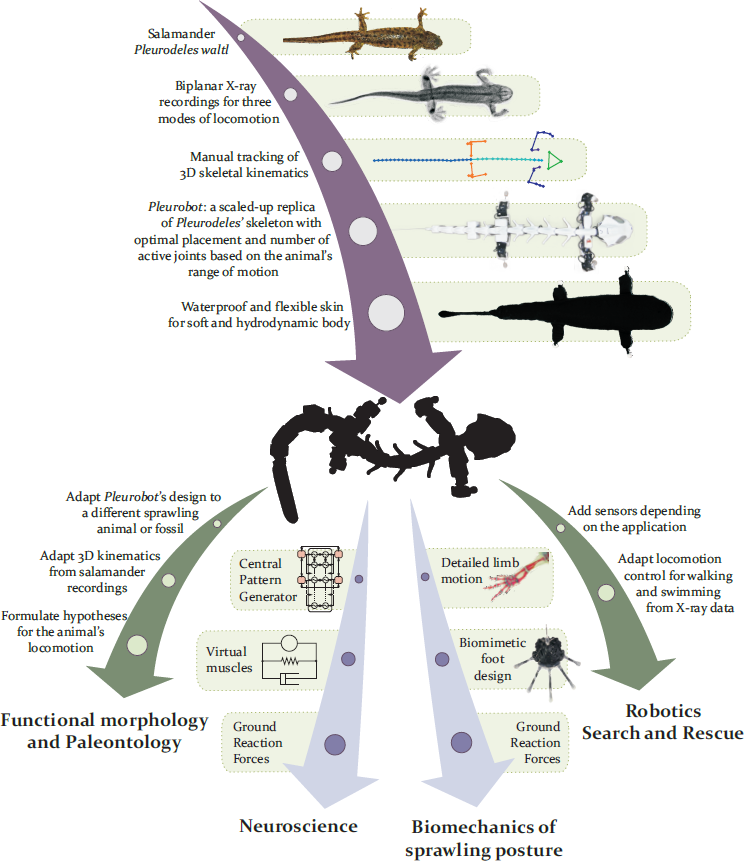
According to the video notes, the Pleurobot is being developed by the BioRob at EPFL and NCCR Robotics. Bioinspired? How so? The robot takes it cues from the salamander and the team is making use of cineradiography to advance their work. They recorded three-dimensional X-ray videos of salamanders, walking on ground, walking underwater and swimming. Tracking up to 64 points on the animal's skeleton, they were able to record three-dimensional movements of bones in great detail. They deduced the number and position of active and passive joints needed for the robot to reproduce the movements with reasonable accuracy in three-dimensions.
Commenting on their work, Evan Ackerman in IEEE Spectrum said, "The key to Pleurobot's lifelike motion is its design, which was based on 3D x-ray movies of a real salamander walking and swimming." He noted that the researchers have been able to reach the point where "the joints and muscles of the robotic salamander respond in just the same way that the joints and muscles of a real salamander do. This means that applying neural patterns that real salamanders use for walking to the robot salamander will (or should, at least) cause the robot to walk in the same way. And it seems to work rather well."
On terrain that is uneven the robot can shift its gait, to overcome an obstacle and, between walking and swimming, also can do "aquatic stepping," floating in the water, but still with contact on the ground.
In the video, the team introduced themselves as the "Salamander Group" of EPFL and Biorobotics Laboratory, part of the Institute of Bioengineering in the School of Engineering at the EPFL. The biggest challenge, they said, has been the waterproofing.
Of what use is their work? Their main goal is understanding the way that the nervous system coordinates movement in vertebrates. "Pleurobot's design, with 27 degrees of freedom, allows us to test more advanced mathematical models of the locomotor nervous system towards richer motor skills," they said. The team said Pleurobot may also prove useful in other ways. "Because of its low center of mass and segmented legs it can navigate over rough terrain without losing balance. With a waterproof skin it can also swim. Those features may one day enable Pleurobot to help in search and rescue operations."
EPFL stands for École Polytechnique Federale de Lausanne. NCCR stands for National Center of Competence in Research Robotics, which is a Swiss nationwide organization funded by the Swiss National Science Foundation. At NCCR researchers aim to develop human-oriented robotic technology.
More information: Pleurobot project page: biorob.epfl.ch/pleurobot
© 2015 Tech Xplore























