August 10, 2015 weblog
HERMES robot and operator can share life-saving moments (w/ video)
A robot's task performance can be tuned to work in dangerous disaster settings when controlled by a human master, in a project under the watchful eyes of an MIT team. Robot researchers from MIT's Department of Mechanical Engineering are behind a robot approach which is capable of keeping the robot's balance and completing tasks.
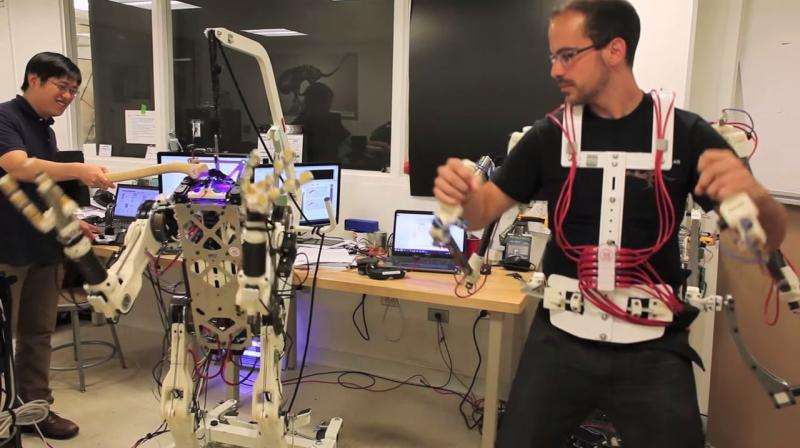
A human operator, a special suit and goggles are the ingredients— along with the robot. As Kelsey Atherton described HERMES in Popular Science, we are looking at "a humanoid robot, steered by a human pilot strapped into a remote-control exoskeleton, with built in reflexes."
MIT researchers discussed how the robot works in a video of HERMES in action. They referred to HERMES as a humanoid platform which they set out to work on for deployment in disaster scenarios. The idea was that, in such scenarios, human deployment can go just so far and, when it is too dangerous for humans, the goal was to deploy something that could do necessary work.
Joao Ramos, Mechanical Engineering, said, "The way I like think about this project is that we're trying to put the human's brain inside the robot. We want to take advantage of what humans can do."
What Ramos means is reflected in an earlier report this year which appeared in MecEConnects, which is news from MIT's Mechanical Engineering department.
HERMES was designed to mimic the movements of its human operator through tele-operation and in return to share its vision and physical "feelings" – its proprioception – with the person.
Alissa Mallinson of MecEConnects referred to their work as a "mapping of bodies between the robot and human" and their challenge was in finding a way to share these feelings of force and balance.
Another kind of balance has been at play—the operator plays the brain while the robot plays the brawn. PhD student Albert Wang told her those on-the-spot decisions that need to be made in crisis situations calls for both qualities.
The type of quick thinking needed in emergency situations cannot be easily programmed. Wang said at the time that the team decided that connecting the robot to a human operator was "the easiest way to incorporate the kind of intelligence we need. It would take a computer a long time and a lot of programming to come to the quick conclusions that humans come to almost instantaneously through good instincts."
The human mind, he added, can work more quickly and at a more sophisticated level. "Instead of sending a robot in with its own intelligence, we just feed all this information back to the person. And if we can achieve this, you could say this is the loop closure rate: It would happen so quickly that the human doesn't even subconsciously think about commanding the robot. They are just feeling something and reacting to it. It's so instantaneous, it's almost an extension of themselves."
Their method involves the use of a full-body suit worn by the human operator; balance sensations from the robot are fed back to the human as forces on the waist. Wearing the suit, the human can move arms and legs, and has handle controllers with a couple of buttons the person can push. The buttons control the robot's hands. For grasping or releasing, they control the force –the robot can grip firmly or loosely or let go.
A camera resides in the robot's head, said Wang, and that vision is fed back to the operator wearing vision goggles. When the human wants to do more delicate tasks, said Wang—things that require strict positioning—he can use the goggles and accomplish more precise hand manipulations.
Ramos noted that at present the actions taken by the robot are commanded by the human, but they want to implement some intelligence in the robot. Wang said in the future they want to merge some level of autonomous control along with the human intelligence.
© 2015 Tech Xplore



















