February 25, 2020 weblog
A ground penetrating support for self driving navigation in bad weather
Consumer confidence in the safety of self-driving cars continues to be a challenge for auto makers planning for an automated driving future, but add to that uneasiness over how well a self-driving car will manage in roads hit by bad weather conditions.
Recently, Wired said that "snow and ice pose a vexing obstacle for self-driving cars," and that "most testing of autonomous vehicles until now has been in sunny, dry climates. That will have to change before the technology will be useful everywhere."
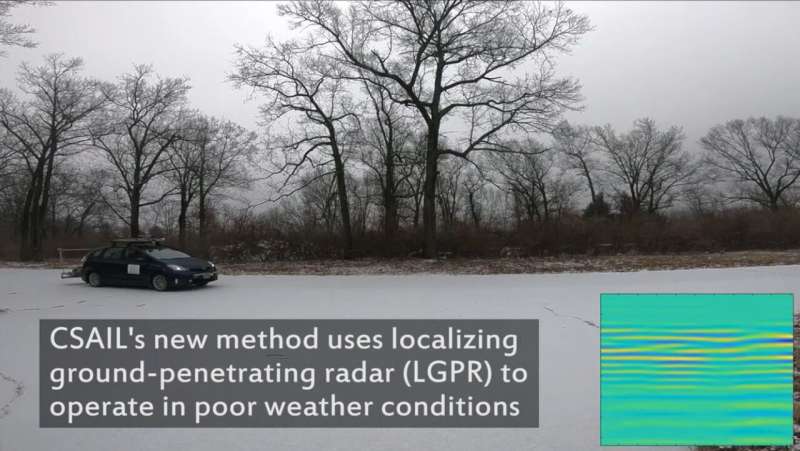
MIT's CSAIL engineers have that covered, as they continue to explore the potential of something called localized ground-penetrating radar (LGPR). This is a technology that can keep the car centered even if pavement markings are blurred or blanketed by snowy conditions. CSAIL team members have evaluated "performance on over 17 km of testing data in a variety of challenging weather conditions. We find that this novel sensing modality is capable of providing precise localization for autonomous navigation without using cameras or LiDAR sensors."
LGPR is designed to help self driving cars navigate the roads in rain and snow. It's a technology that was developed at the MIT Lincoln Laboratory, enabling vehicle navigation using subsurface geology. Engineers at Lincoln Lab demonstrated that changes in soil layers, rocks and road bedding could be used to localize vehicles to centimeter-level accuracy. GearBrain was one of several sites impressed with LGPR, saying it could well be used to create an entire under-road map of a city, then downloaded by vehicles ahead of driving there.
Maps required for the sensor would have the benefit of changing less often than other, above-ground maps.
The work was partially supported by MIT Lincoln Lab. Inverse said that LGPR was developed at the MIT Lincoln Laboratory. As far back as 2017, MIT News carried a report that "engineers at MIT Lincoln Laboratory, who developed localizing ground-penetrating radar (LGPR), have demonstrated that features in soil layers, rocks and road bedding can be used to localize vehicles to centimeter-level accuracy. The LGPR has been used for lane keeping even when snow, fog or dust obscures above-ground features."
The CSAIL team has been busy testing out the technology on self-driving cars with encouraging results. As ZDNet pointed out, CSAIL's instrumentation was only tested on a closed country road and at slow speeds. Still, the results seemed encouraging.
In a Feb. 24 video, viewers are reminded that self-driving cars usually utilize cameras and lidar sensors to navigate. In rain and snow, though, you cannot depend on the two.
Why not? Mike Brown had an answer in Inverse. Snow confuses these sensors. In some cases, the camera cannot see in the brilliant white, or a lidar's lasers bounce back in the snowfall. As Brown wrote, the system's electromagnetic sensors measure the combination of rocks, soil and roots. "This unique fingerprint can be used to help the car identify its current position even when cameras and lidar can fail to pick up cues."
ZDNet noted that snow can blanket lane markings and even traffic signs; rain might cause camera malfunctions. In LGPR, electromagnetic pulses are emitted into the ground and reflected back up by underground objects, according to Ben Coxworth in New Atlas.
Inverse had more details on their findings: "The LGPR fared impressively in the six months and 10.5 miles of tests, traversing a closed country road at a low speed. The margin of error in snowy conditions was around an inch compared to clear weather. Unfortunately, this increased to 5.5 inches in rain, as it changes the condition of the soil. In the whole period of testing, the team never had to take over."
Inverse referred to a spokesperson from MIT calling the solution a logical next step toward a more comprehensive self-driving system.
Nonetheless, there is still room for further development regarding this sensor. What about more complex road layouts? What about improving the sensor bulky measurements? As ZDNet said, "The hardware, too, is six feet wide and would need a serious overhaul before it would be small enough to integrate with a standard vehicle."
You will be hearing more about their research findings; the engineers have written a paper describing their work titled "An Appearance-Independent Autonomous Navigation System Based on a Localizing Ground Penetrating Radar," to be published in the journal IEEE Robotics and Automation Letters.
© 2020 Science X Network




















