January 2, 2015 weblog
Robot looks like a fish to ride with marine life
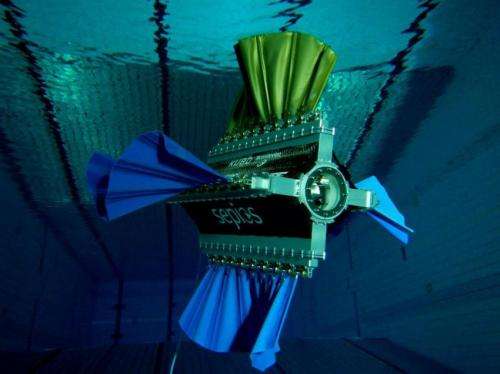
(Phys.org)—Students at the Swiss Federal Institute of Technology (ETH) in Zürich are working on a project that could deliver an ideal device for marine life filming, minus the turbulence and appearance that could scare fish away. They are working on Sepios, a nautical robot with fish-like appearance that would make it ideal for closing in on fish. The device, they said, is a four-finned cuttlefish-inspired robot, a distance away from classical nautical vehicles on the level of maneuverability. They said "contrary to the cuttlefish, it uses four fins, to maximize our goal of omnidirectionality."
Evan Ackerman in IEEE Spectrum called out the robot's advantages: "Cuttlefish are highly maneuverable little critters, but Sepios is an upgrade, with four independently controllable fins that allow it to rotate on any axis and translate in any direction." The students, at the Autonomous Systems Lab at ETH Zurich, said the Sepios project is "riding the wave of progress."
Last year, they took the robot sea diving in France. The robot tested successfully in the sea, shown diving through sea grass and attracting fish with its good-looking fins. Ackerman also commented on the performance of the underwater vehicle: "Sepios has no trouble moving through dense patches of seagrass, even in surge, which would be a tangled nightmare for any underwater vehicle relying on propulsion systems that produce thrust by spinning. It also generates a minimal amount of turbulence." The body length is 70 cm with a wingspan of 95 cm and weight of 22.7 kg. The top speed of Sepios is 1.8 km/hr, with a maximum depth of 10 meters and battery life of one hour and 30 minutes. The robot is fully assembled and almost operational.
The use of four fins helps support their goal of omnidirectionality. Each of these consists of nine rays, actuated individually by servo motors via bevel gears. Each of these rays has a range of 270 degrees, and a fin can generate thrust in angled stances, for acrobatic motions such as barrel rolls. Every fin has its own servo controller in charge of all the servos. The four fins are attached to a single central base unit. This, they said, contains the only other actuator, a swim bladder that helps the robot stay on level depth and various sensors. "We took particular care to make sure all the seals would hold to guarantee water tightness, as this is often a very critical factor in the design of underwater robots."
They have work to do. "Sepios has many different sensors which have to be coordinated, including a pressure and a humidity sensor. There will also be a camera and laser for collision detection and an Inertial Measurement Unit (IMU) to measure accelerations and angular velocities."
Their project site discussed the challenges including precise control of the robot. "The final version of the software is supposed to be controllable only by a single 3D Connexion space mouse. The signal is then filtered and combined with the data of our Inertial Measurement Unit (IMU) to control the attitude of the robot. The single force and torque vector is then split onto the individual fins by an allocator which optimizes energy." Most central to the project, they added, was proof of omnidirectionality. "This we are trying to achieve with the combination of an obstacle course and a mathematical proof."
More information: sepios.org/#project
© 2015 Tech Xplore


















