March 12, 2015 weblog
ATRIAS prepares for live demo at robotics challenge (w/ Video)
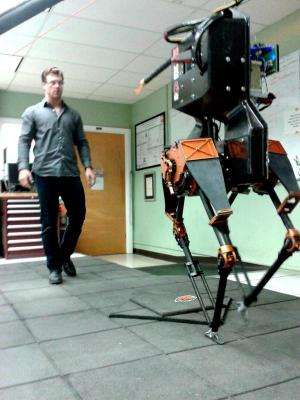
If you are cool-headed enough to know that robots are incapable of sobbing just because researchers at the Oregon State University Dynamic Robotics Laboratory are kicking and hurling balls at them all the time, then so much the better. You can enjoy the success of ATRIAS withstanding its trials as a bipedal robot taking its kicks and dodgeball hits in stride at Oregon State University. ATRIAS is the name for human-scale bipedal robots. ATRIAS serves to demonstrate theoretical concepts for efficient and agile locomotion; the ultimate goal is walking and running outside in rough terrain.
The name is an acronym for Assume The Robot Is A Sphere. This mirrors the team's philosophy: make ATRIAS as close to a simple spring-mass system as they can. Their result has been a robot that is designed to move like a simple "spring-mass" model, comparable to a pogo stick. They describe a four-bar carbon-fiber leg mechanism. It is lightweight, softening footfalls rather than sending large jolts to the body. The legs are mounted to series-elastic fiberglass springs. They act as a suspension and means of mechanical energy storage. For ATRIAS, the team said, it was actually easier to hold position not by standing still, but by stepping in place, or "dynamic standing."
The principal investigator in this project is Jonathan Hurst of Oregon State University and there are two other investigators outside of OSU, who are Hartmut Geyer, Carnegie Mellon University and Jessy Grizzle, University of Michigan. The ATRIAS site says that there are three ATRIAS robots in operation around the United States. Hurst's lab at OSU, Grizzle's lab at the University of Michigan and Geyer's lab at Carnegie Mellon are working with ATRIAS prototypes. ATRIAS will appear for a live demonstration at the DARPA Robotics Challenge in Pomona, California on June 5 to 6.
The robot's success factors have also posed challenges as the designers prepare for the big event. "Robots don't typically have such spindly legs, such tiny feet, or big springs attached to their motors. But those springs absorb and recycle energy that would be ordinarily lost with every step. The lightweight shins and thighs reduce shock loads when its legs swing and hit the ground. Like a high-end sports car, all of ATRIAS' mechanisms are designed and tuned to cooperate with each other and enable maximum performance." But, they said, also like a fast car, ATRIAS isn't easy to drive. "The mathematics commonly used to control robotic walking just doesn't work for ATRIAS. This means that researchers at the Dynamic Robotics Laboratory, in collaboration with Dr. Hartmut Geyer's laboratory at Carnegie Mellon, have been constantly inventing their own controllers to make ATRIAS go. Their goal: make ATRIAS walk, maneuver over obstacles, and run on the open outdoor stage."
More information:
mime.oregonstate.edu/research/drl/atrias/
spectrum.ieee.org/automaton/ro … ot-dodgeball-barrage
© 2015 Tech Xplore


















