January 18, 2016 weblog
Housekeeping ATLAS-style: Tedious but each minute counts
Sweeping up, tidying up, pushing the handle of a cleaner back and forth, kneeling for a stray paper and depositing it into a wastebasket, YAWN.
This is the household stuff we do without much thought but for the model ATLAS, fundamental housecleaning tasks pose agility and manipulation challenges.
The research team at Pensacola, Florida-based Institute for Human and Machine Cognition (IHMC) are up to the challenge; they have been working on ATLAS to do simple house-cleaning chores, not with any ambition to put it to work at hotels, where it would clearly fail to finish all the rooms in good time, but to see how much they can achieve in demonstrating whole-body coordinated motions.
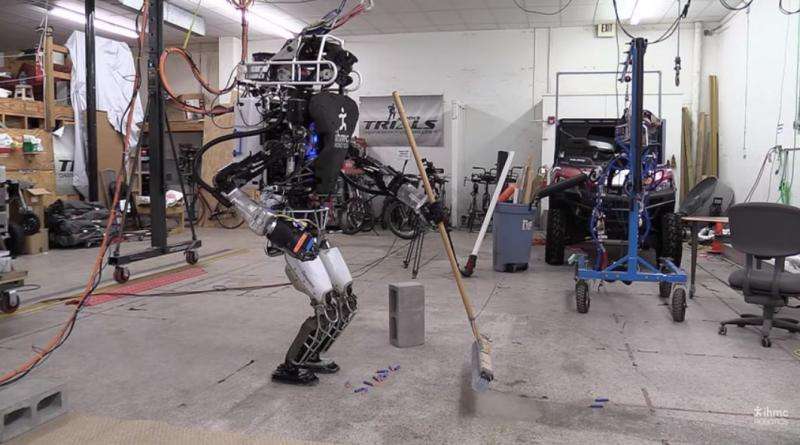
ATLAS is the humanoid robot that can walk bipedally leaving upper limbs free to lift, carry, and manipulate.
The robot is built by Boston Dynamics and the control algorithm is from the IHMC Robotics Lab. They released a video recently which shows the robot in action, cleaning and tidying up.
Compared to a human worker, the robot gets low grades in speed and grace, but IEEE Spectrum said that is not the point.
IEEE Spectrum's Evan Ackerman asked, "why the heck IHMC is teaching ATLAS to clean house, and sadly, the answer is not "because we're about to announce the availability of that robot butler you've always wanted." Rather, it's because ATLAS needs to be run often to make sure that code updates don't break anything, and running the same tasks (like DRC tasks) over and over again gets boring."
To make the tedium more interesting, the team worked on the ATLAS as housekeeper and if its moves are deliberate and slow, you may be surprised to know that you are watching the video demo at 20x normal speed, according to Ackerman.
Watching the video is not for the impatient; those curious enough to see how well ATLAS performs the chores, though, will stay with the robot even if it does the tests slowly. If the video viewer needs patience, one can imagine how much patience the engineers need.
John Carff, IHMC research associate, takes us into the world of someone who must direct ATLAS.
Carff is quoted in IEEE Spectrum: "It takes a lot of patience and out-of-the-box thinking to be a robot operator. When you approach a task or situation you've never seen before, you need to think of as many different ways of completing that task as you can and figure out what approach would be best for the robot."
IEEE Spectrum said one of the features of this housecleaning robot is a newer option to have the robot walk while keeping its hands in front of it, allowing it to perform tasks such as sweeping. "Just as with the DRC, not much of this is fully autonomous, but a lot of it is semi-autonomous with human supervision."
Carff went further to detail the nature of what he controls.
"Most of the stuff in this video is controlled by me, but in a co-active way. I'm not simply sitting there with a joystick teleoperating the robot: I tell the robot through the UI that I want to grab a bottle off the table by clicking the bottle and making sure that the resulting hand is in the correct place. Then, the robot tells me how it's going to move its entire body to reach that location, through a preview in the UI. If I'm okay with the plan the robot has come up with, I tell it to execute that motion."
A reader reaction on the YouTube video page expressed appreciation for what Carff and team has been doing. He remarked that "lifting up one foot and activating that pedal is the most impressive thing I've ever seen a two-legged robot do. It's a snap for us humans, but I totally get how complex that is for a robot."
Next step? Apparently, with IMHC, walking away from ATLAS is not an option. Ackerman remarked that there is still room for improving control algorithms, "and the only way to make sure that those algorithms are improving is to keep on trying to get ATLAS to perform all kinds of different tasks."
© 2016 Tech Xplore




















