Water-based reconfigurable robot could offer new solutions to underground pipe network inspection
Researchers at the University of Sheffield have created an aquatic robot which could be used during underwater search and rescue operations.
The researchers will reveal their findings later this week at the International Conference on Robotics and Automation (ICRA 2016) - the world's largest gathering in robotics, held this year in Stockholm, Sweden.
The study looks at a set of robotic modules that, similar to Lego, can be assembled into robots of arbitrary shape. This allows robots to be customised to meet the changing demands of their task.
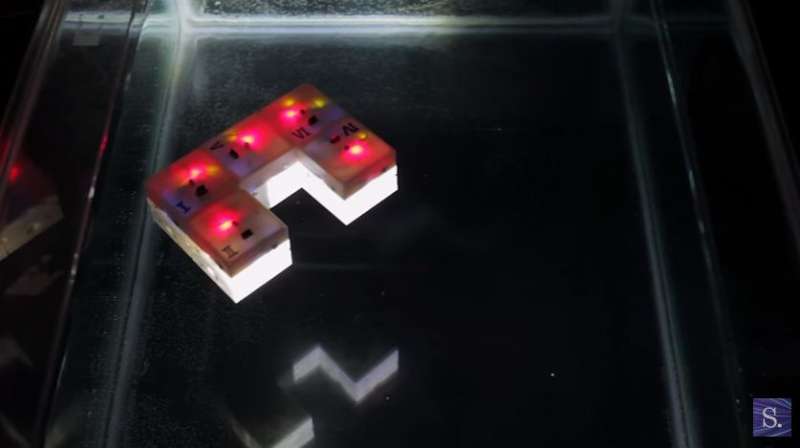
Each module is a cube and has four micro pumps which allow it to move around independently in the water. When modules are joined together, they can draw in fluid from each other, as well as the environment. The routing of the fluid through the network of modules causes the robot to move. The more modules in the network, the more precisely the robot moves, and the better it copes with faults. This new concept is termed Modular Hydraulic Propulsion (MHP). Six prototype modules of an MHP robot were constructed, which float on the surface of water.
The scientists set the robot a task – to detect and move towards a light source. The robots can solve this task reliably without having a central brain. Rather, each module makes its own decisions independently, and only needs a single byte of sensor information to do so.
Dr Roderich Gross, from the Department of Automatic Control and Systems Engineering, who is leading the team, said: "One of the challenges in robotics is to make robots small enough so that they can travel through confined spaces that are otherwise inaccessible. Shrinking robots down, potentially to sub-millimetre scale, puts severe constraints on the hardware and therefore how much information these robots can process."
Modular Hydraulic Propulsion could offer new solutions to problems requiring reconfigurable systems to move precisely in 3D confined spaces, such as the inspection of underground water pipes. In the future, miniaturised versions of MHP robots may even enter the vascular network to monitor the health of patients or deliver drugs in a targeted manner.
Matthew Doyle, a PhD student from the Department of Automatic Control and Systems Engineering who has been working on the project, said: "One potential use for a robot like this is during search and rescue operations in an underwater environment. You may not know the situation in advance, and the robot will have to adapt to whatever it faces.
"The modules could split up and search for survivors more quickly and recombine to lift a heavy object and open up a passageway.
"This type of robot could also be used by utility companies wanting to deal with blockages or faults in pipes that are difficult and expensive to access from the surface."
The research was funded by an Engineering and Physical Sciences Research Council grant. Researchers are now hoping for additional funding to develop the research further and look at how smaller versions of the modules could travel through 3D confined spaces and solve problems of increasing complexity.
More information: Doyle M., Xu X., Gu Y., Perez-Diaz F., Parrot C., Groß R. Modular hydraulic propulsion: a robot that moves by routing fluid through itself: ICRA 2016, in press. naturalrobotics.group.shef.ac. … /2016-icra-doyle.pdf


















