July 7, 2017 weblog
Salto-1P robot: Researchers show off its bouncing talents
(Tech Xplore)—At UC Berkeley's Biomimetic Millisystems Lab researchers have been modifying Salto, that little fast jumping robot, and a number of robotics-watching sites have been marveling over what's new.
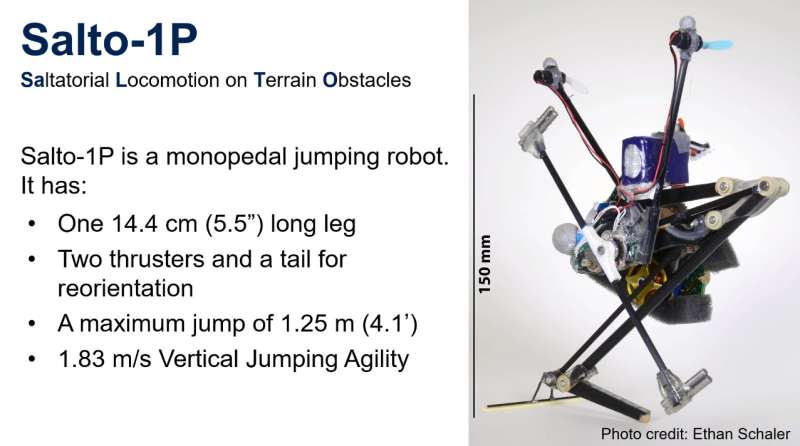
Salto is a small monopedal jumping robot from UC Berkeley's Biomimetic Millisystems Lab.
So what is special about their upgraded Salto? IEEE Spectrum said, "the new Salto-1P is jumping longer, faster, and higher than ever."
"Salto's creators had initially given the machine the ability to jump against – and push away – from vertical obstacles," said The Engineer.
Ackerman explained where it showed its limitations.
"Salto had impressive vertical jumping agility, and was able to jump from the ground onto a vertical surface, and then use that surface to change its direction with a second jump. It was very cool to watch, but the jumping was open-loop and planar, meaning that two jumps in a row was just about all that Salto could manage."
Salto-1P's repertoire now includes the ability to repeatedly bounce around thanks to the addition of 'aerodynamic thrusters for out-of-plane orientation control', plus a tail to reorient itself," said The Engineer on Thursday.
A video of the latest Salto, titled "Bouncing Around with Salto-1P" shows repeated free hopping in a Vicon motion capture environment.
As the video shows, it has tail, 2 aerodynamic thrusters and 1 long leg. Actually, that tail and thrusters are quite why little Salto is drawing interest. Evan Ackerman in IEEE Spectrum wrote that "Because it spends so little time in contact with the ground, the robot needs to do most of its control in the air." (He noted that 92 percent of the time, the robot is in the air.)
In order to stabilize and reorient itself in between jumps, it uses that rotating inertial tail and two thrusters.
"Think hyper-aggressive pogo-stick," said research team member Duncan Haldane in an email exchange with IEEE Spectrum. "Jumpers are good in terrain where good spots to put a hand or foot are small and far apart. Also good if you want a small robot to be able to hop up onto a table, up stairs, or simply move around in a human-scale environment."
The video shows it jumping in place, back and forth, jumping on obstacles, and performing very fast.
Ackerman described what is going on in the background. "The path it follows relies on motion capture, with an offboard computer (though not a particularly powerful one) receiving tracking data and wirelessly sending control commands to the robot."
Their work is described in a paper, "Repetitive Extreme-Acceleration (14-g) Spatial Jumping With Salto-1P," by Duncan Haldane, Justin Yim, and Ronald Fearing from UC Berkeley's Biomimetic Millisystems Lab. It will be presented in September at IROS 2017 in Vancouver, Canada.
Moving forward, Matt Simon in Wired offered his thoughts on where this could go, saying "the cool thing here isn't that Salto pulls the record for robotic leaps with its four-foot jump—other robots can jump higher—but that it can jump at a wall, then pull off a second jump. It's doing parkour, only Salto doesn't fall on its face."
Simon added that as Haldane perfects the controls, "one day he'll get the robot to string together many more jumps and better avoid obstacles to travel significant distances."
Search and rescue could be one use for such a robot. "After all, rubble is no place for a wheeled robot," said Simon.
"We've seen other jumping robots over the years, but Salto-1P takes the cake," said Ackerman.
Salto stands for Saltatorial Locomotion on Terrain Obstacles.
© 2017 Tech Xplore



















