December 21, 2017 report
Team in Japan creates most advanced humanoid robot yet
")
A team of researchers at the University of Tokyo has created what appears to be the most advanced humanoid robot yet—actually two of them, one called Kenshiro the other Kengoro. In their paper published in the journal Science Robotics, the team describes working to make robots that are as similar to humans as possible and demonstrates what their two latest models can do.
As robotics has advanced, most robots have evolved to become near single-purpose machines. Some are designed to paint cars, for example, others to carry supplies for soldiers. But some are of another class altogether, and are called humanoids because their purpose is not necessarily to accomplish a task, but to mimic the abilities of human beings. To that end, the researchers in Japan have been refining robotic parts to mimic human parts and assembling them to make whole robots that move as closely as possible to the ways humans move. For example, they give their robots rib cages, backbones and rotating joints. The result is surprisingly lifelike movement in similarly lifelike forms.
Of the two robots the team is demonstrating, Kengoro is the most advanced, because it is the most recent humanoid the team has built. It can do push-ups, pull-ups, back bends, and even hit a badminton birdy. In another interesting first, it also sweats, to a certain extent. Because it has actuators to pull strings meant to mimic muscle movement, the humanoid gets hot. To prevent overheating, the team ran water tubes through the robots. Some of the heat is dissipated by venting steam through tiny holes in its aluminum skeleton.
The researchers claim Kengoro has six times the degree of freedom of other humanoids, and is able to move more of its parts in human-like ways than any other. It can stand on its toes, for example, or turn its head side to side in ways reminiscent of humans trying to crack their necks.
")
The researchers suggest striving to create the most human-like robot possible is not purely for vanity's sake—they believe that robots that move like humans will be able to offer unique testing possibilities. Robots that move like humans in car crash tests, for example, could offer a more realistic depiction of what actually happens to humans when they undergo such trauma.
-
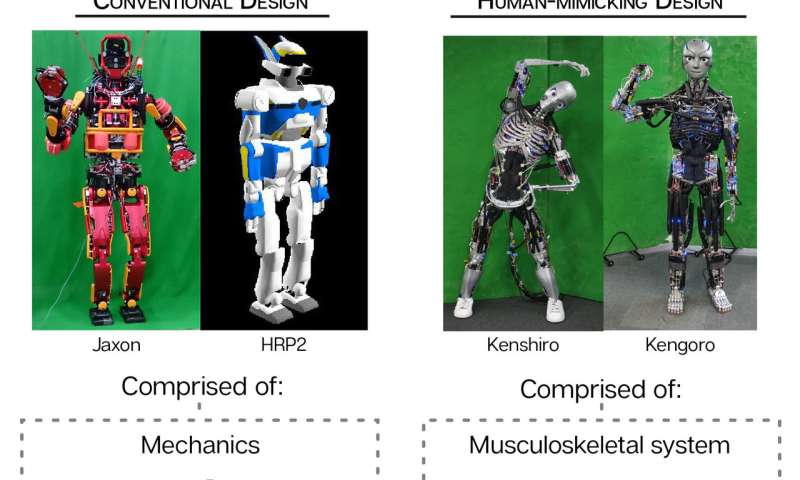
The difference between previous humanoid prototypes, which use conventional design principles, and Kenshiro and Kengoro, which closely mimic human anatomy. Credit: Carla Schaffer / AAAS -
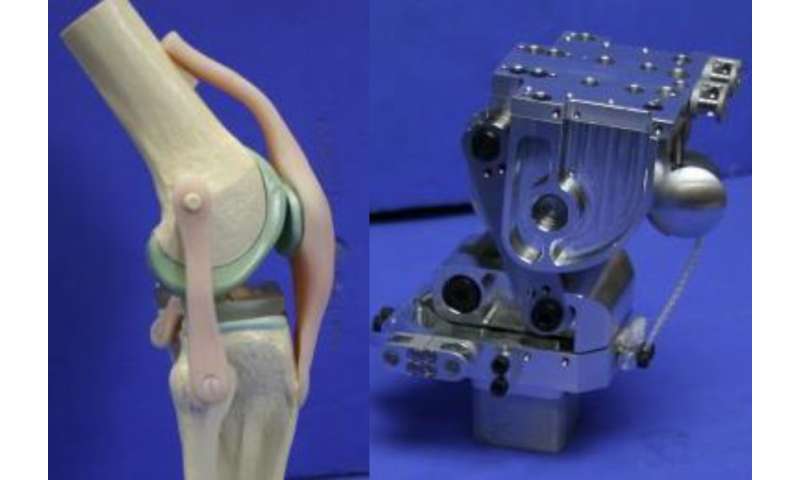
Kenshiro and Kengoro’s joints mimic the architecture of human joints, like the “screw-home” mechanism of the human knee. Credit: Asano, Okada, Inaba, Sci. Robot. 2, eaaq0899 (2017) -
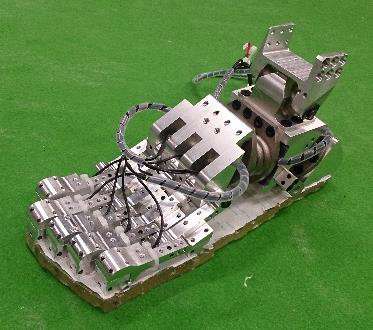
Kengoro is equipped with five-fingered hands and feet, essential for maintaining balance and achieving complex motions. Credit: Asano, Okada, Inaba, Sci. Robot. 2, eaaq0899 (2017)
More information: Yuki Asano et al. Design principles of a human mimetic humanoid: Humanoid platform to study human intelligence and internal body system, Science Robotics (2017). DOI: 10.1126/scirobotics.aaq0899
Abstract
Many systems and mechanisms in the human body are not fully understood, such as the principles of muscle control, the sensory nervous system that connects the brain and the body, learning in the brain, and the human walking motion. To address this knowledge deficit, we propose a human mimetic humanoid with an unprecedented degree of anatomical fidelity to the human musculoskeletal structure. The fundamental concept underlying our design is to consider the human mechanism, which contrasts with the conventional engineering approach used in the design of existing humanoids. We believe that the proposed human mimetic humanoid can be used to provide new opportunities in science, for instance, to quantitatively analyze the internal data of a human body in movement. We describe the principles and development of human mimetic humanoids, Kenshiro and Kengoro, and compare their anatomical fidelity with humans in terms of body proportions, skeletal structures, muscle arrangement, and joint performance. To demonstrate the potential of human mimetic humanoids, Kenshiro and Kengoro performed several typical human motions.
© 2017 Tech Xplore


















