May 29, 2018 weblog
Quadrotor safety system offers protective interference against rotor mishaps
Drone watchers are talking about a neat idea that has emerged from a prototype by researchers from Australia's University of Queensland, in Brisbane, Australia. They have worked on a rotor safety system for small UAVs (quadrotors).
They call their safety solution the Safety Rotor and it delivers a solution to guard against the risk of accidents involving the spinning blades. Stop those rotors! Their solution obeys.
Spinning hoops, electromagnetic braking, feature in this solution.
"A cage around the propellers spins more slowly than the propellers and is constantly on the lookout for biological material approaching the blades," said John Biggs in TechCrunch.
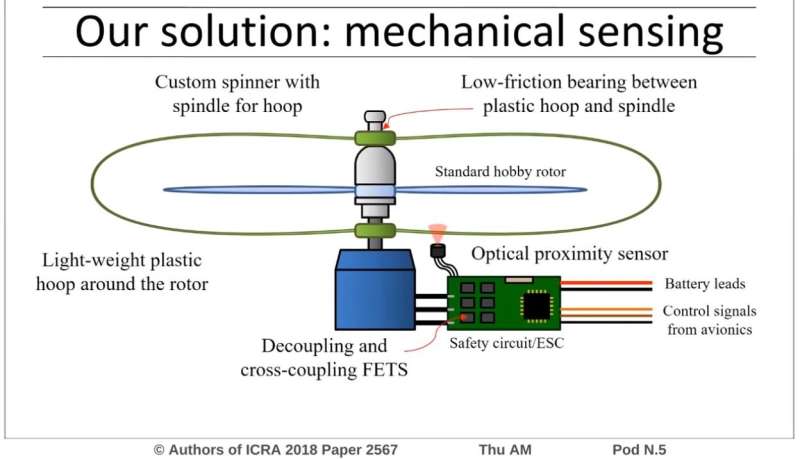
The blades are enclosed by a hoop, passively rotating around the same axis as the blades. Any object interfering with the hoop results in a decrease in speed at which the hoop is spinning.
IEEE Spectrum's Evan Ackerman: "It's a simple idea: A plastic hoop is added to the rotor system that spins around the rotor plane, such that anything that would make contact with the rotor must make contact with the hoop first. And if the hoop senses a contact, it puts the brakes on the rotor, slowing it enough that it'll turn needing a finger into needing a band-aid."
A safety circuit decelerates all rotors. As a result, the blades turn harmless by the time the object—such as a hand— would make contact or else change the motion of the craft away from the object to avoid collision. Blades are stopped from spinning, in less than 0.06 of a second from the time that the finger touches the hoop, said New Atlas.
The hoop that is fitted around the blades is made of rigid or semi-rigid material. Its rotation speed is fast enough to effectively form an enclosed shell around the blades, but not too fast to be considered an additional hazard. A sensor measures the rotation speed of the hoop and any slowdown in rotation triggers the immediate braking of all rotors.
UniQuest provided details on features, and said that "The hoop that is fitted around the blades is made of rigid or semi-rigid material. Its rotation speed is fast enough to effectively form an enclosed shell around the blades, but not too fast to be considered an additional hazard. A sensor measures the rotation speed of the hoop and any slowdown in rotation triggers the immediate braking of all rotors."
A video that presents their Safety Rotor notes that high-speed rotors can be dangerous; even small rotors can injure people. Injuries may be serious. They may range from lacerations to even amputations and loss of vision. The video presenter said drones operating around suburbs and population centers should be cause for concern.
But wait. Who would be so daft to put one's hand directly in front of the spinning blades? That's not the problem.
Evan Ackerman in IEEE Spectrum: "Not running into people with your drone is generally good advice, but the problems tend to happen when for whatever reason the drone escapes from your control. Maybe it's your fault, maybe it's the drone's fault, but either way, those spinny bits can cause serious damage."
Typical rotors spin at 4000-8000 RPM. The protective method that the researchers propose re-uses existing structures. They said their solution can be easily retrofitted in existing quadrotors.
They give a detailed account of their solution and testing results in their ICRA 2018 paper, "The Safety Rotor—an Electromechanical Rotor Safety System for Drones" by P Pounds and W Deer. The team was led by Dr. Paul Pounds, said Ben Coxworth in New Atlas.
According to UniQuest, the safety rotor came out of Pounds' Robotics Design Laboratory in the School of Information Technology and Electrical Engineering. (UniQuest Pty Limited is a university commercialization entity, managing the intellectual property of The University of Queensland.)
Coxworth referred to "those fast-spinning and potentially skin-slicing rotor blades."
What's next? Pounds' team recently presented Safety Rotor at the 2018 International Conference on Robotics and Automation, and is now looking for partners interested in commercializing the system, Coxworth said.
Ackerman commented that their quadrotor-safety system managed to be "highly effective, reliable, lightweight, and cheap all at the same time."
UniQuest, meanwhile, noted the system uses low-cost off-the-shelf components combined with a low-cost plastic manufacturing process.
More information: uniquest.com.au/safety-rotor-r … ircraft-systems-rpas
© 2018 Tech Xplore




















