October 26, 2018 feature
Evolving the physical structure of robots to enhance performance in different environments

Researchers at CSIRO & Queensland University of Technology have recently carried out a study aimed at automatically evolving the physical structure of robots to enhance their performance in different environments. This project, funded by CSIRO's Active Integrated Matter Future Science Platform, was conceived by David Howard, research scientist at Data61's Robotics and Autonomous Systems Group (RASG).
"RASG focuses on field robotics, which means we need our robots to go out into remote places and conduct missions in adverse, difficult environmental conditions," David Howard told TechXplore. "The research came about through an identified opportunity, as RASG makes extensive use of 3-D printing to build and customise our robots. This research demonstrates a design algorithm that can automatically generate 3-D printable components so that our robots are better equipped to function in different environments."
The main objective of the study was to generate components automatically that can improve a robot's environment-specific performance, with minimal constraints on what these components look like. The researchers particularly focused on the legs of a hexapod (6-legged) robot, which can be deployed in a variety of environments, including industrial settings, rainforests, and beaches.
"The legs are readily convertible into 3-D-printable files, so we can easily print the legs and clip them onto our hexapods for deployment," Howard said. "We hypothesised that changing the shape of the legs would give us different performance and the paper describes an early demonstration of this capability. We took inspiration from the most powerful creative force on the planet, one that again and again creates forms that function in sometimes very difficult environmental conditions: evolution."

The system developed by Howard and his colleagues uses a genetic algorithm to optimise collections of Bezier splines (3-D versions of the 'curve' tool on Microsoft Paint), defining the shape of the robot's tibia. Candidate leg designs are optimised based on how fit they are for a particular environment. In their study, this optimization was based on a function of the energy required to walk through an environment and the amount of material required to create the leg.
"We start with a population of random legs, assess them in a high-fidelity simulated environment (gravel, hard earth and water were the ones we focused on) and get their fitness scores," Howard explained. "These scores are used to implement a 'survival of the fittest' selection process, so that good legs are kept and bad legs are 'killed.' The good legs then get a chance to reproduce, using analogues of crossover, in which a child leg has features of two parent legs, and through mutation, where features of the shapes are randomly modified."
This approach allows the algorithm to search for good shapes to apply on the robot's legs, within a space of possible solutions. The researchers generated a number of child legs and then had them 'compete' with parent legs to determine which one would be included in the next generation round. The shape of the robot's legs was automatically optimized over time, after hundreds of such generations.

"We were able to show environmental specialisation in the populations of legs," Howard said. "They automatically evolved so that, for example, larger footprints were consistently seen in legs evolved to walk in gravel, as this stops the leg slipping into the gravel and either getting stuck, or expending excessive energy to remove the leg. In hard soil, on the other hand, the legs became thinner as there was no penalty to having a smaller footprint."
The researchers found that the legs produced were indeed 'niched,' in an evolutionary sense. In other words, the shape of legs varied greatly, as they had evolved to work best in different environments.
-
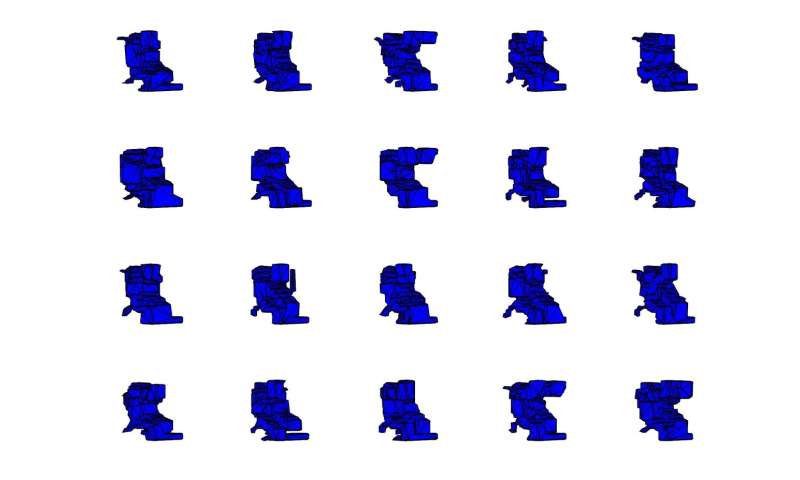
Image show what happens when we mutate a leg -note that they are all a bit different. This is because of the ‘genetic’ mutation we do on the Bezier curves. Some of these variations will be beneficial and some will be detrimental, because we select based on fitness the more beneficial mutations are likely to be preserved. Credit: Collins et al. -
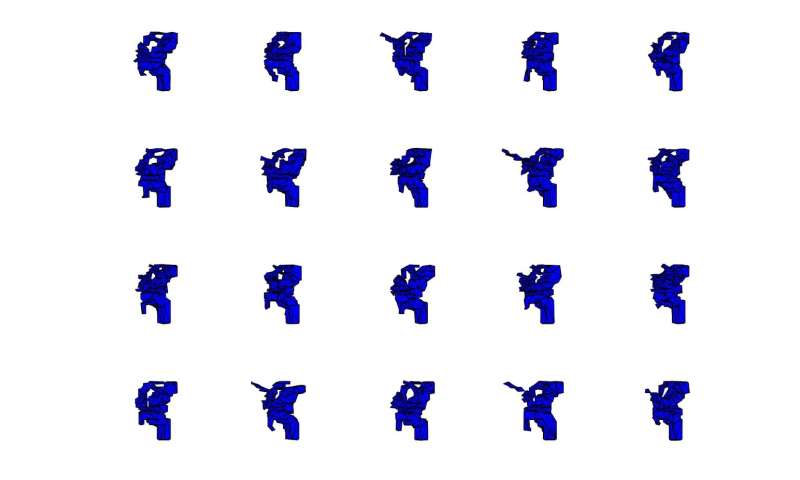
Image show what happens when we mutate a leg -note that they are all a bit different. This is because of the ‘genetic’ mutation we do on the Bezier curves. Some of these variations will be beneficial and some will be detrimental, because we select based on fitness the more beneficial mutations are likely to be preserved. Credit: Collins et al.
"Performance-wise, too, an optimal leg for one environment wasn't as optimal in other environments," Howard said. "This is important because it shows that our algorithm creates environment-specific shapes."
The study carried out by Howard and his colleagues could be an important first step toward the development of robots that are best equipped to operate in different environmental settings. So far, they have only evaluated generated legs in simulations. Before they can be deployed, therefore, the researchers will need to test their designs in the real world and prove that they perform better than conventional legs.

"We also want to consider using evolution to select different material types into the legs," Howard said. "We can use multi-material 3-D printing to create legs made with different types of materials, which we expect will further improve the ability of the legs to work well in different environments. We have also started using more complex representations for the leg shapes, in this case, neural networks called compositional pattern producing networks, which can specify the shape and material properties of the legs without being limited to Bezier-like geometries."
More information: Towards the targeted environment-specific evolution of robot components. arXiv: 1810.04735v1 [cs.RO]. arxiv.org/abs/1810.04735
Towards the targeted environment-specific evolution of robot components. ACM GECCO conference. dl.acm.org/citation.cfm?id=3205455.3205541
© 2018 Tech Xplore


















