February 15, 2019 weblog
Shape-morphing joints allow these small robots to ace obstacles
To walk. To jump. To swim. Nature's beings can use the same body parts to do a variety of things—like walk, jump and swim. Robots? Think about it. You generally see them do limited tasks with their mechanical designs and rigid links.
That difference is narrowing thanks to those in robotics who are working on soft and adaptive robots. If the robot is reconfigurable, then it can use its same hardware for various capabilities.
At Colorado State University, they are introducing a new kind of small reconfigurable robot that is into shape-morphing. Its plastic structure can become soft—then can be re-hardened—changing up joint configurations and motion.
The Adaptive Robotics Lab is where the researchers choose to put movement limitations aside. The lab's focus is building small, adaptive robots that can reconfigure their shapes, structures, or functions so that they fulfill varied tasks. The robots can operate in environments, from on land, to air, to underwater. Switching different leg positions, the robots are designed to climb over obstacles, or lower themselves under obstacles.
"An Adaptive Walking Robot With Reconfigurable Mechanisms Using Shape Morphing Joints" describes their work. The authors are Jiefeng Sun and Jianguo Zhao. Both are from the department of mechanical engineering, Colorado State University. Their paper is in IEEE Robotics and Automation Letters.
They are using variable materials for the shape-morphing joints. The structure makes use of plastic and Evan Ackerman in IEEE Spectrum said the joints are mostly 3-D printed.
Shape-morphing joints is a concept that easily grabs the curious. Just as their names imply, the joints can be soft for a compliant joint or they can be rigid for a structure.
And, where it gets interesting: "If a mechanical mechanism has several SMJs, we can change its functionality by strategically softening and solidifying appropriate SMJs, without altering the underlying mechanical design after it is fabricated," the two wrote in the video notes.
They showed how their concept pans out in the form of a leg mechanism that can generate varied foot trajectories. This is made possible by selecting locations of SMJs and morphing the shapes of its links.
"The fabricated mechanism shows smooth transitions between three example trajectories," they said. "With those trajectories, we implement the mechanism in a walking robot to demonstrate different functions."
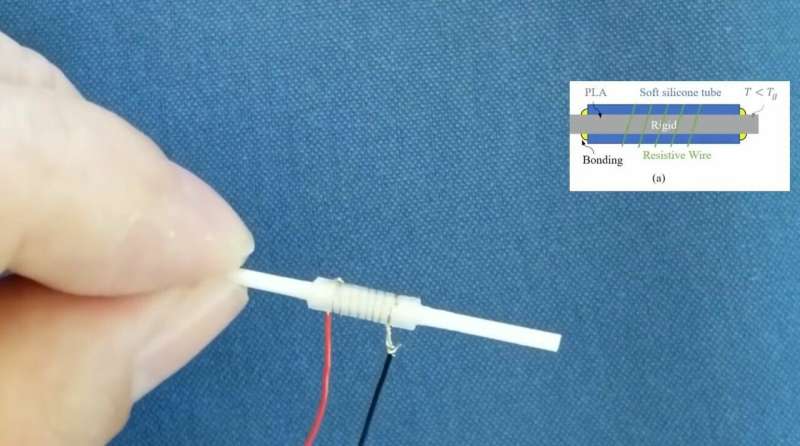
In the video, you see a stiff plastic object that becomes a soft joint when electricity is applied. They apply electricity again, and the object goes back to its original stiffness.
In the bigger picture, one can say the walking robot in the video further demonstrates the future potential of adaptive robots that can change sizes, shapes, or functions to fulfill multiple tasks in different environments, and that can actually travel in different mediums. According to Zhao in IEEE Spectrum, for example, the team envisions amphibious robots that can morph forelimbs to be more suitable as needed for walking or for swimming.
The Download described how a wire that heats up when a voltage is applied is wrapped around the joints. In about 10 seconds, they soften. The Lab site said they are working on new actuation methods for soft robots: twisted-and-coiled actuators (TCAs).
While the word "adapt" and "morph" describe their focus, The Download of MIT Technology Review, presenting "what's up" in emerging technologies, was hooked on another word, "melt." Its post told readers they were looking at a robot that can melt and re-form its legs in order to change how it walks. In order to navigate obstacles successfully, that is what it does—melt and re-solidify its structure.
Why this matters: "One day, something similar could be useful for robots that need to adapt to different or tasks, such as environmental monitoring," said The Download. There are more possible uses, too. In an exchange with IEEE Spectrum, Zhao said those robots could be used for military surveillance, and search and rescue in disaster areas.
Moving forward, Zhao said the team hoped to accomplish robots with multimode locomotion capabilities such as swimming, walking or flying.
As important, they intend to try to improve their technique's performance—for example, cutting down the time it takes for the morphing process. The ultimate goal is real-time shape morphing or reconfiguration in dynamic environments.
More information: Jiefeng Sun et al. An Adaptive Walking Robot With Reconfigurable Mechanisms Using Shape Morphing Joints, IEEE Robotics and Automation Letters (2019). DOI: 10.1109/LRA.2019.2893439
© 2019 Science X Network




















