July 11, 2019 feature
PuzzleFlex: Computing the kinematic motion of systems with loose joints

Small motions between individual parts in jigsaw puzzles, LEGO buildings, human backbones and systems of connectable modular robots can allow flexing of their entire structures. A team of researchers at Dartmouth College has recently carried out a study exploring the kinematics (i.e. the features or properties of motion in objects) of collections of rigid bodies that become flexible when combined together as a system. Their paper, pre-published on arXiv, introduces PuzzleFlex, a new method of computing free motions of a planar assembly of rigid bodies connected by loose joints.
"We are interested in robot construction of buildings out of interlocking bricks," Devin Balkcom, one of the researchers who carried out the study, told TechXplore. "The main feature of interlocking bricks is that they connect without the need for cement, allowing simpler construction and re-use, much like LEGO toys. Unlike LEGOS, our bricks do not rely on friction, and may connect loosely, making it easier to put them together. The main objective of the current work is to analyze the flexibility and strength of the resulting puzzle-like structures."
The tool devised by Balkcom and his colleagues models joints using local distance constraints. It then linearizes these constraints according to configuration space velocities, attaining a linear programming formulation that can be used to analyze systems made up of thousands of rigid bodies, also referred to as puzzles.
"We wrote mathematical equations that express how the distances between points on adjacent puzzle pieces change as the pieces make small motions," Samuel Lensgraf, the main graduate student driving the research, told TechXplore. "We then use this set of equations to analyze how large-scale motions of distant pieces may be compounded from small local motions. One key advantage of the proposed method is that it includes certain approximations that allow very rapid computation, enabling the analysis of puzzles with thousands of pieces."
The researchers have tested their method on several systems composed of rigid bodies of varying sizes. They observed that PuzzleFlex encountered greater difficulties when analyzing some systems, typically denser structures, while it solved other puzzles fairly swiftly.
"Our most meaningful finding is that some arrangements of interlocking brick puzzles are sturdier than others and that computational methods can be fast enough to consider many different possible arrangements quickly, providing insight into good and bad building designs," Balkcom said.
In the future, the method developed by Balkcom, Lensgraf and their colleagues could have numerous interesting applications. For instance, It could be used to analyze collections of modular robots, to carry out structural stability perturbation analyses or to study the tolerance of mechanical systems.
-
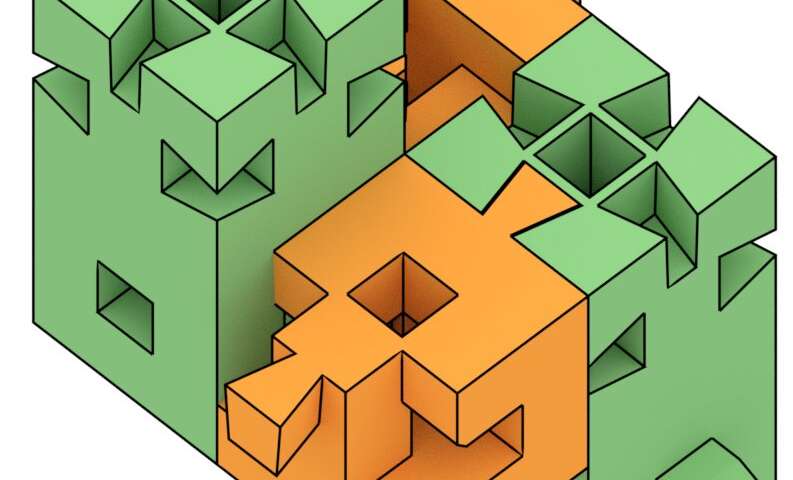
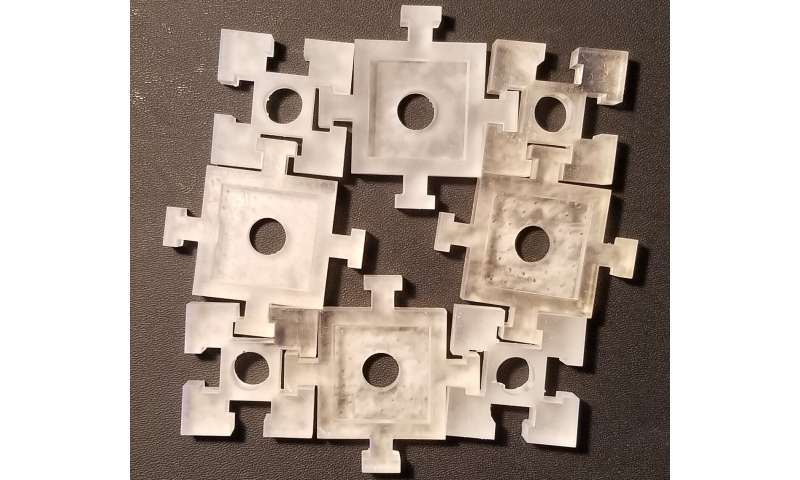
Interlocking bricks that motivated the study. Credit: Yinan Zhang & Devin Balkcom. -
Further examples of the flexibility of planar puzzles. Credit: Lensgraf et al. -
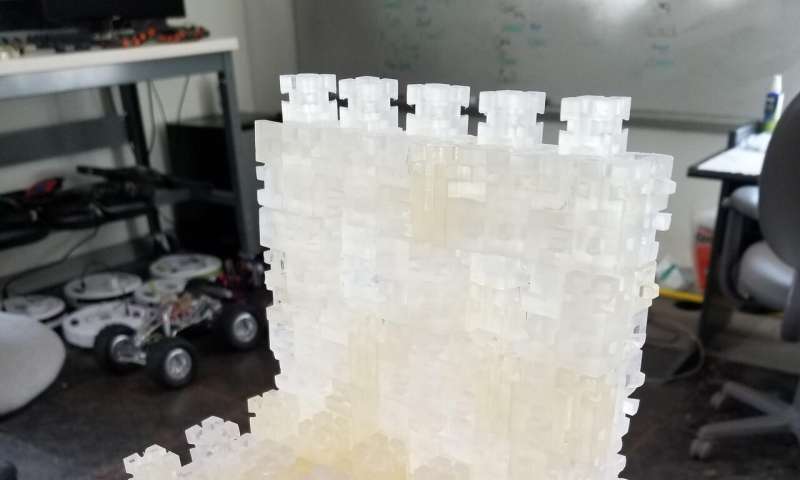
A chair constructed using interlocking blocks. Credit: Yinan Zhang & Devin Balkcom.
In addition, it could help to investigate the formation control of a variety of mobile robots. The researchers are now planning to further enhance their approach and compare it with other state-of-the-art dynamics simulation approaches.
"The published mathematical approach applies to planar puzzles; we are currently extending the method to work with three-dimensional interlocking puzzles," Lensgraf added.
More information: PuzzleFlex: kinematic motion of chains with loose joints. arXiv:1906.08708 [cs.RO]. arxiv.org/abs/1906.08708
© 2019 Science X Network


















