August 16, 2019 feature
Solving a Rubik's Cube with a dexterous hand

In recent years, a growing number of researchers have explored the use of robotic arms or dexterous hands to solve a variety of everyday tasks. While many of them have successfully tackled simple tasks, such as grasping or basic manipulation, complex tasks that involve multiple steps and precise/strategic movements have so far proved harder to address.
A team of researchers at the Chinese University of Hong Kong and Tencent AI Lab has recently developed a deep learning-based approach to solve a Rubik's Cube using a multi-fingered dexterous hand. Their approach, presented in a paper pre-published on arXiv, allows a dexterous hand to solve more advanced in-hand manipulation tasks, such as the renowned Rubik's Cube puzzle.
A Rubik's Cube is a plastic cube covered in multi-colored squares that can be shifted into different positions. The goal of the puzzle is to strategically twist and turn the cube's sections until all the squares on each of its faces are of the same color.
"Seeing some researchers use multi-fingered robot hands for tasks like reposing an object and manipulating a tool, we considered whether we could utilize a robot hand for more complicated tasks, such as solving a Rubik's Cube," Tingguang Li, one of the researchers who carried out the study, told TechXplore.
To tackle the Rubik's Cube puzzle using a dexterous hand, Li and his colleagues developed a hierarchical deep reinforcement learning model that essentially separates the task into a planning and a manipulation stage. In their study, the researchers applied this approach to a five-fingered dexterous hand called the Shadow Hand.
"The challenges of solving a Rubik's Cube using a robot hand are two-fold: First, controlling a robot hand is very difficult since it has a high degree of freedom; second, solving a Rubik's Cube requires a long motion sequence," Li explained. "Our idea combines a deep reinforcement learning algorithm, which has many successful applications, and human knowledge. The goal is to show the dexterity of a robot hand and solve a randomly scrambled Rubik's Cube with a high success rate.
The hierarchical model proposed by the researchers has two key components: one for planning and one for manipulation. Initially, the planning component (i.e., a model-based cube solver) identifies the optimal mode sequence for solving the puzzle. Then, the manipulation controller (i.e., a model-free cube operator) controls the dexterous hand's fingers to execute these steps.
"Our approach has two layers: The higher layer plans a trajectory for solving a Rubik's Cube which is composed of atomic actions, and the lower layer learns to implement each atomic action," Li said. "The atomic actions are learned via deep reinforcement learning model, getting rid of manually designing complicated low-level controllers."
The researchers trained and evaluated their model using a high-fidelity simulator, which they also built. They tested their model's performance in a series of experiments in which the virtual dexterous hand was fed 1400 randomly scrambled Rubik's Cubes and found that it achieved an average success rate of 90.3 percent.
"We showed that the multi-fingered robot hand has a huge potential for complicated tasks," Li said. "Integrating learning-based algorithms can help to reduce the heavy work of manually designing control algorithms. I hope that this will attract more researchers to this area and encourage them to develop new approaches to further increase the dexterity of robot hands."
-
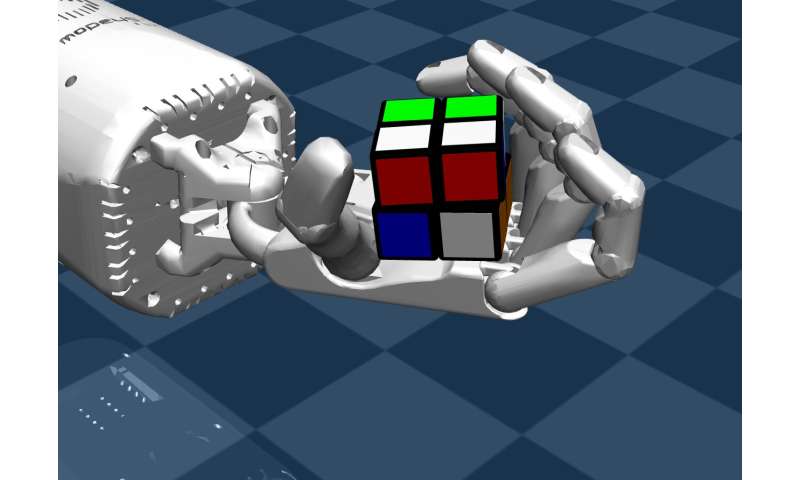
Credit: Li et al. -
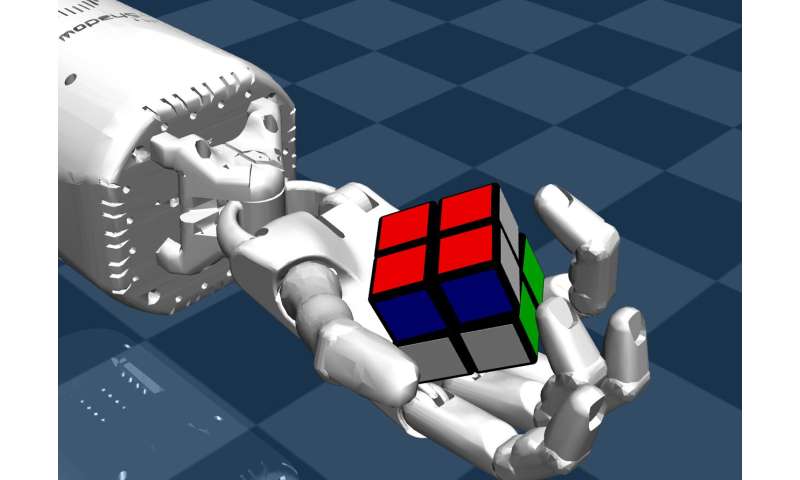
Credit: Li et al. -
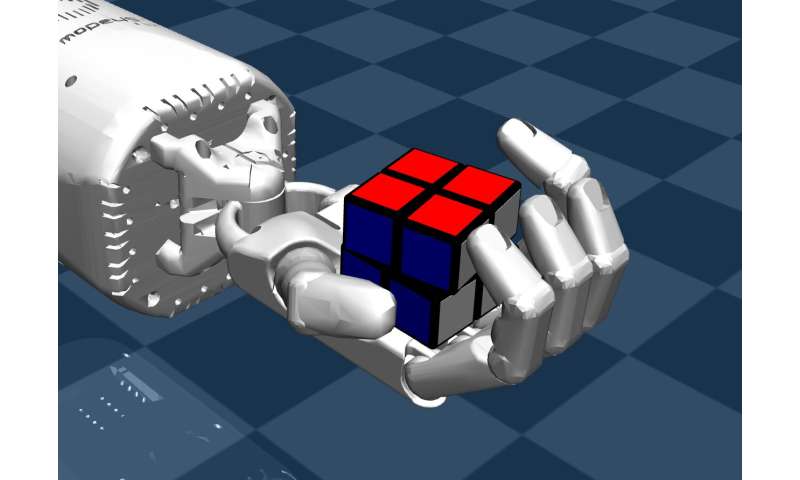
Credit: Li et al.
In contrast with previously proposed approaches, the model developed by Li and his colleagues enables the completion of a more complex in-hand manipulation task using a dexterous hand, specifically solving a Rubik's Cube. So far, the researchers have only evaluated their approach in simulations, but they are now planning to apply their algorithm on a real robotic hand.
More information: Learning to solve a Rubik's cube with a dexterous hand. arXiv:1907.11388 [cs.RO]. arxiv.org/abs/1907.11388
Contact-invariant optimization for hand manipulation. homes.cs.washington.edu/~todor … rs/MordatchSCA12.pdf
Yunfei Bai et al. Dexterous manipulation using both palm and fingers, 2014 IEEE International Conference on Robotics and Automation (ICRA) (2014). DOI: 10.1109/ICRA.2014.6907059
© 2019 Science X Network















