September 21, 2020 feature
PufferBot: A flying robot with an expandable body

Researchers at University of Colorado Boulder's ATLAS Institute and University of Calgary have recently developed an actuated, expandable structure that can be used to fabricate shape-changing aerial robots. In a paper set to be presented at the 2020 IEEE/RSJ International Conference on Intelligent Robotics and Systems (IROS), they introduced a new robot, dubbed PufferBot, which was built using this unique and innovative structure.
"One of the major goals of our research is to address a longstanding problem in robotics, which is that robots remain extremely difficult for people to work with," Hooman Hedayati, one of the researchers who carried out the study, told TechXplore. "There are several reasons for this, including human inexperience with robots, safety issues that robots introduce, and a lack of consideration regarding how humans and robots can effectively communicate. All of these issues are compounded when we consider aerial robots (i.e., drones)."
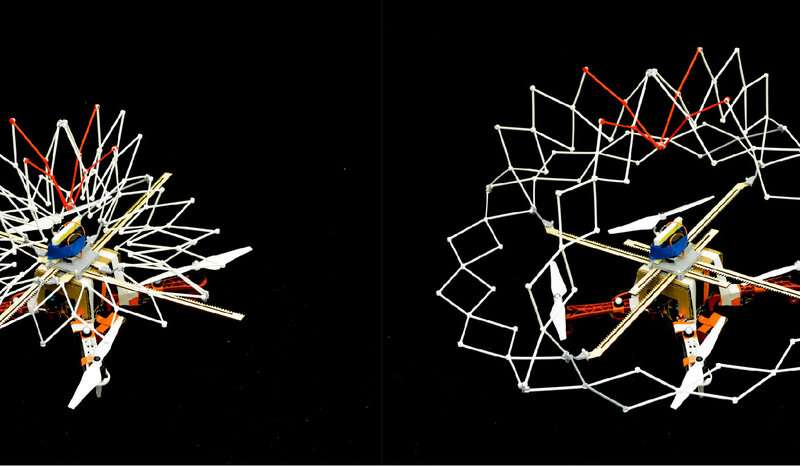
In their recent study, Hedayati and his colleagues set out to investigate different strategies that would allow roboticists to "re-design" and alter the traditional structure of drones. Drawing inspiration from the expanding capabilities and biological characteristics of pufferfish, they created a new structure that allows drones to rapidly change shape by expanding and contracting.
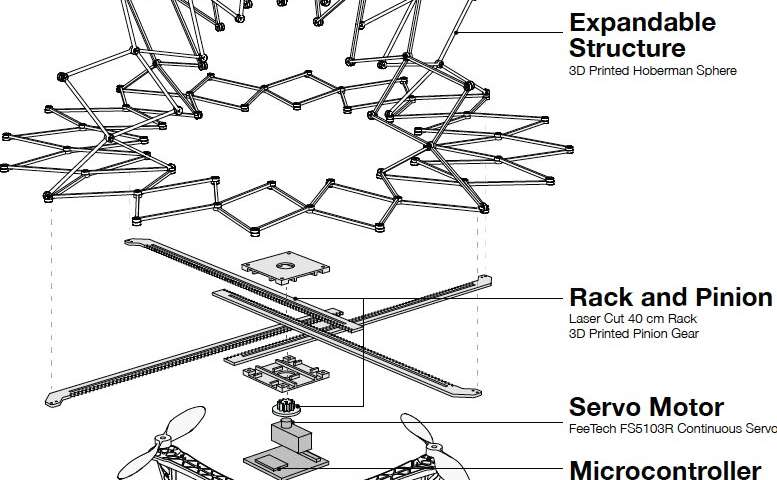
The structure they designed, based on an expandable frame and an actuator with one degree of freedom, also replicates the expansion of airbags in vehicles. It thus has several advantages over more conventional drone designs, as it can limit the damage caused by a robot's collision with objects in its surroundings, just like airbags provide greater safety for human drivers.
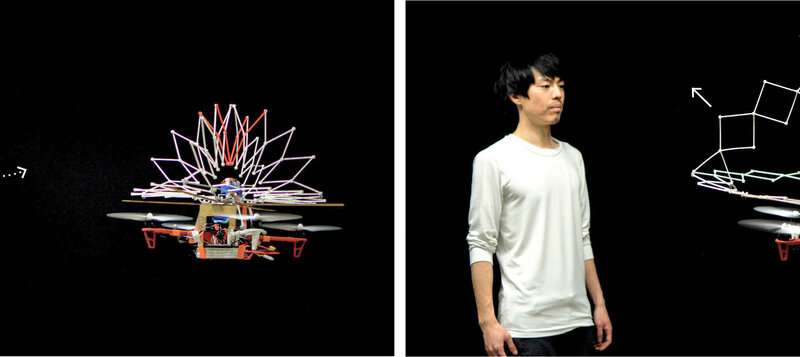
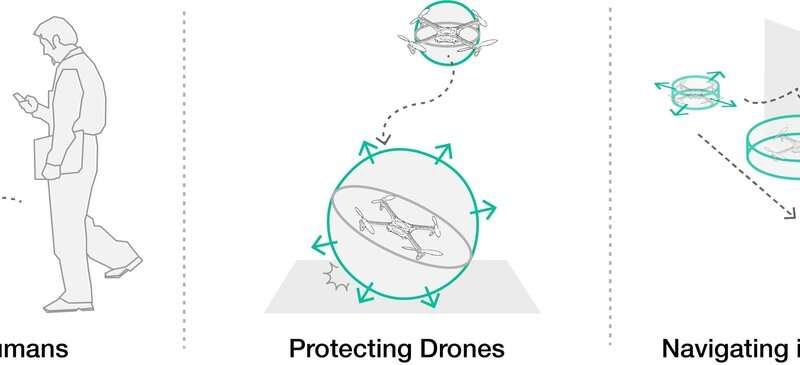
"Our design offers several new communicative properties and potential safety benefits, as in the case of a collision or crash, the expandable structure can reduce impacts to both the robot and whatever the robot hits," Hedayati explained. "PufferBot has a one-degree-of-freedom actuator that controls the size and stiffness of an expandable structure that surrounds a drone. For example, when the drone is flying through a cluttered space or if it is about to collide with an object, the actuator can deploy the structure to protect the drone by covering its propellers and internal electronics."
In contrast with existing systems that use static propeller guards, the structure devised by the researchers is adjustable and can be of different sizes. This means that it does not necessarily decrease a drone's maneuverability.
Since it provides robots with the ability to significantly change their size and appearance (by shrinking and expanding), the structure could also serve as a useful communication tool. For example, a drone could be programmed to expand when it senses a specific type of threat or stimulus in its environment, in order to warn humans from a distance.
-
Credit: Hedayati et al. -
Credit: Hedayati et al.
"From our point of view, robots that can change their shape and size are relatively underexplored in the field of robotics, while some interesting and related developments are ongoing in the area of tensegrity robots and reconfigurable rovers," Hedayati said. "In general, we believe the expandable structure we developed can help in many ways for robot operators, collocated humans, and the robot itself. For instance, it may help drone operators fly drones with more confidence, knowing that they have a deployable frame that can be activated to reduce the risk of collision."
PufferBot could prove particularly useful for completing missions in environments where robots have a higher chance of colliding with other objects. In addition, the expandable structure it is based on could be adapted and used to build other drones or robots with the same expanding and shrinking capabilities.
-
Credit: Hedayati et al. -
Credit: Hedayati et al.
"Going forward, we are interested in exploring how actuated, expandable structures, such as those used in PufferBot, can support human-robot interactions by enabling robots to be more expressive," Hedayati said. "In particular, we want to study how such structures might enable a robot to use new types of 'gestures' to convey information such as, 'don't come close' or 'you should go in this direction,' etc. to humans."
More information: Hedayati et al., PufferBot: Actuated expandable structures for aerial robots. arXiv:2008.07615 [cs.RO]. arxiv.org/abs/2008.07615
© 2020 Science X Network



















