This article has been reviewed according to Science X's editorial process and policies. Editors have highlighted the following attributes while ensuring the content's credibility:
fact-checked
peer-reviewed publication
trusted source
proofread
Biomechanics model that shows how humans efficiently walk at varied speeds could pave way for new robotics
 using a musculoskeletal model that mimics a human. The existing reflex control framework could not accurately change the walking speed. Credit: Tohoku University")
We typically don't think about it while doing it, but walking is a complicated task. Controlled by our nervous system, our bones, joints, muscles, tendons, ligaments and other connective tissues (i.e., the musculoskeletal system) must move in coordination and respond to unexpected changes or disturbances at varying speeds in a highly efficient manner. Replicating this in robotic technologies is no small feat.
Now, a research group from Tohoku University Graduate School of Engineering has replicated human-like variable speed walking using a musculoskeletal model—one steered by a reflex control method reflective of the human nervous system. This breakthrough in biomechanics and robotics sets a new benchmark in understanding human movement and paves the way for innovative robotic technologies.
Details of their study were published in the journal PLoS Computational Biology.
"Our study has tackled the intricate challenge of replicating efficient walking at various speeds—a cornerstone of the human walking mechanism," points out Associate Professor Dai Owaki, and co-author of the study along with Shunsuke Koseki and Professor Mitsuhiro Hayashibe. "These insights are pivotal in pushing the boundaries for understanding human locomotion, adaptation, and efficiency."
The achievement was thanks to an innovative algorithm. The algorithm evolved beyond the conventional least squares method and helped devise a neural circuit model optimized for energy efficiency over diverse walking speeds.
Intensive analysis of these neural circuits, particularly those controlling the muscles in the leg swing phase, unveiled critical elements of energy-saving walking strategies. These revelations enhance our grasp of the complex neural network mechanisms that underpin human gait and its effectiveness.
-
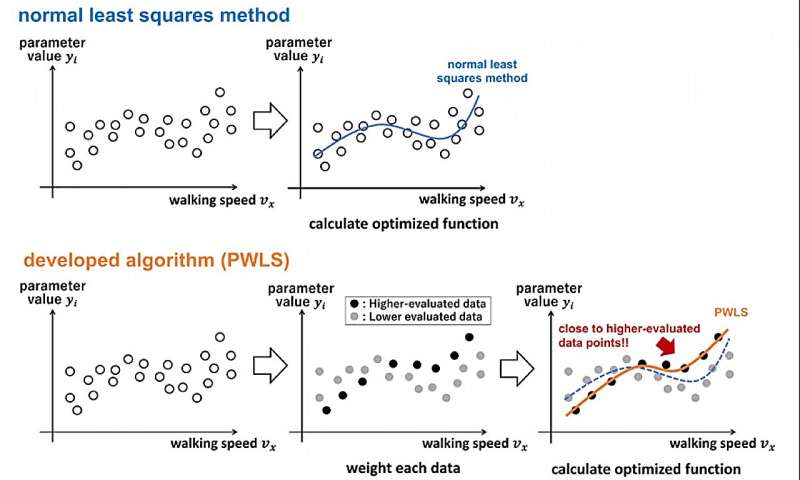
A schematic overview of the proposed optimization algorithm (PWLS). The plotted data points show the relationship between control parameter values and reproduced walking speeds. If the function expressing this relationship was obtained using the general least squares method, the data generating energy-efficient and non-energy-efficient gait are not distinguished and treated with the same evaluation. In the proposed PWLS, by adding weights based on evaluation values (energy efficiency) to the data points that generate energy-efficient walking, it is possible to obtain the relationship between the walking speed and the control parameters that realize highly efficient walking and to construct a neural circuit model that enables the generation of more energy-efficient walking. Credit: Tohoku University -
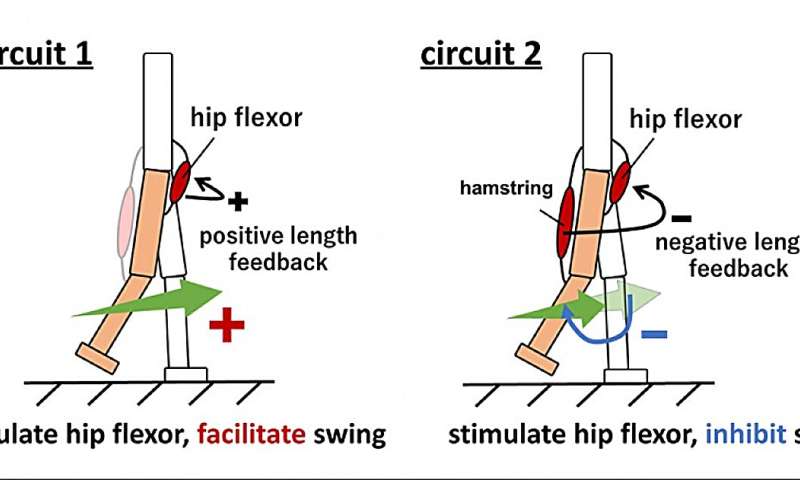
The two identified neural circuits contribute to energy-efficient walking over a wide range of velocities in reflex control: first, the reflex circuit related to the vastus medialis that facilitates forward swing of the leg; second, the reflex circuit related to the vastus medialis and hamstring that inhibit forward swing of the leg. Credit: Tohoku University
Owaki stresses that the knowledge uncovered in the study will help lay the groundwork for future technological advancements.
"The successful emulation of variable-speed walking in a musculoskeletal model, combined with sophisticated neural circuitry, marks a pivotal advancement in merging neuroscience, biomechanics, and robotics. It will revolutionize the design and development of high-performance bipedal robots, advanced prosthetic limbs, and state-of-the-art- powered exoskeletons."
Such developments could improve mobility solutions for individuals with disabilities and advance robotic technologies used in everyday life.
Looking ahead, Owaki and his team hope to further refine the reflex control framework to recreate a broader range of human walking speeds and movements. They also plan to apply the insights and algorithms from the study to create more adaptive and energy-efficient prosthetics, powered suits, and bipedal robots. This includes integrating the identified neural circuits into these applications to enhance their functionality and naturalness of movement.
More information: Shunsuke Koseki et al, Identifying essential factors for energy-efficient walking control across a wide range of velocities in reflex-based musculoskeletal systems, PLOS Computational Biology (2024). DOI: 10.1371/journal.pcbi.1011771


















