April 10, 2016 weblog
Bipedal rethink: Who said it had to mimic mighty humans?
A ready to reveal bipedal robot? All eyes usually search for signature signs of merit: moves like a human, bends like a human, climbs like a human, survives tripping like a human, all the challenges for which robotics experts must at least show good attempts.
Writing about robots last year in Popular Science, Levi Sharpe said, "Humans have evolved to walk on two legs, but getting robots there has proven quite challenging so far."
He quoted a researcher at the University of Michigan College of Engineering. There are a lot of challenges with building a bipedal robot that mimics a human's gait, since human walking is essentially controlled falling. There are also limitations to current technology that add a whole other challenge.
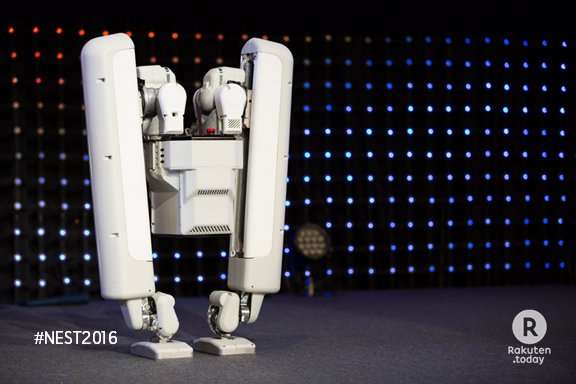
Surprise, surprise. Fixing your eyes on this new bipedal, you can forget about comparing it to your favorite smooth-walking neighbor. This bipedal robot looks nothing like a human but some minutes with it during its debut on stage at a recent event in Japan drew much applause.
The robot may not yet have a name but its impact might be in inspiring robot experts to think about its look and its functioning. The robot teases the question, really, must a bipedal look human?
The robot in question is a two-legged walker designed by Alphabet-owned Schaft Inc.
"The nameless robot strutted onstage at the New Economic Summit in Japan, joining Schaft co-founder Yuto Nakanishi and facing a delighted crowd," reported Devin Coldewey in TechCrunch.
Evan Ackerman in IEEE Spectrum provided some interesting background into Schaft:
"One of the keynote speakers [at the summit] is Andy Rubin. Rubin was in charge of Google's robotics program in 2013, when the company (now Alphabet) acquired a fistful of some of the most capable and interesting robotics companies in the world. One of those companies was SCHAFT, which originated at the JSK Robotics Laboratory at the University of Tokyo and is best known for winning the DARPA Robotics Challenge Trials by an absurd amount."
Coldewey summed up the interesting bits about this robot —namely its walking system. "Rather than imitate a human gait, which is a remarkably complex controlled-falling affair, these robots have rigid legs that slide up and down like rails. This allows them to lift without bending, while joints at the top allow them to be canted in or out and 'ankles' at the bottom provide stability on uneven terrain. Batteries and motors are suspended between the legs, creating a naturally low center of gravity."
Nakanishi showed a video of the robot walking indoors, climbing up steps and going down steps outdoors.
The robot even succeeded in a big stadium environment to step sideways to leave the aisle and take to the steps. It also can survive a pipe as an obstacle deliberately shoved in its path. It maneuvered rough terrain including pebbles on a beach and snow.
So what's next? X, Alphabet's experimental technology lab, apparently has that information. According to Ackerman in IEEE Spectrum: "An X spokesperson says the SCHAFT presentation 'wasn't a product announcement or indication of a specific product roadmap. The team was simply delighted to have a chance to show their latest progress.'"
More information: rakuten.today/
© 2016 Tech Xplore




















