May 7, 2016 weblog
Researchers see the power of two in robot roaches making climb
(Tech Xplore)—Over at the University of California Berkeley the field of biomimetics is alive and well with researchers actively studying and harnessing the way animals can move and manage their environments— little is ignored in the mechanics and dynamics as the researchers see if they can come up with little robots with like capabilities.
As Evan Ackerman observed in IEEE Spectrum: "Some of the most successful insects are the social and cooperative ones, like ants, which can do incredible things."
Two researchers were in the news recently because of their impressive work in getting roach-like robots to climb. Carlos Casarez and Ronald Fearing are ready to report on their work in a paper titled "Step Climbing Cooperation Primitives for Legged Robots with a Reversible Connection," which will be presented at ICRA 2016 in Stockholm, Sweden from May 16.
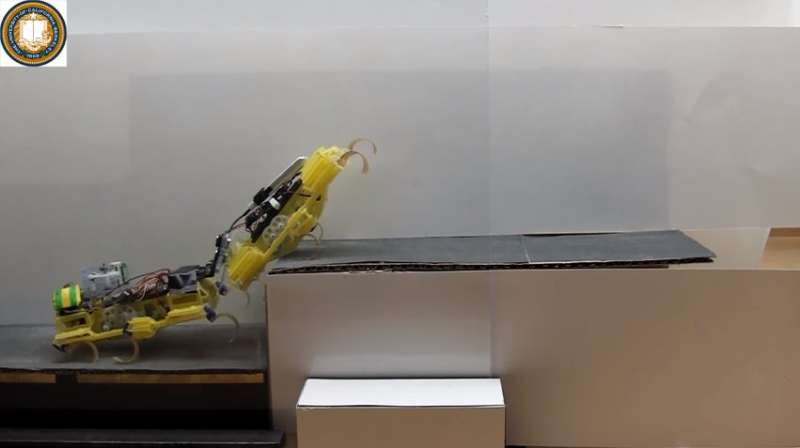
A video is up as well that shows how "Two VelociRoACH Robots Cooperatively Climb a Step." The importance of their work is focused on the fact that they used two robots to accomplish an otherwise daunting task of climbing something.
Steps placed as obstacles in research settings has posed quite a challenge for little robots unable to control leg articulation and contact forces. Evan Ackerman in IEEE Spectrum said these were "absolutely terrible at climbing over obstacles. The problem is that the underactuated nature that makes them so fast and cheap to produce also means that you can't control the motion of each leg independently."
Adding a winch module exerts forces on a tethered magnetic connector. Casarez, lead author of an upcoming paper in IEEE Spectrum, commented on what the winch means in strategy: "The tether-assisted climbing mode fills in the last piece of the step climbing strategy— instead of just sending one member of the team up the step after climbing while connected, the winch can be used to pull the other team member up the step as well."
Ackerman wrote about the winch module too: "The tethering system itself consists of a rapidly-prototyped winch module with a polyethylene monofilament tether and magnetic connector that can be latched on to a compliant pin on the back of a second VelociRoACH." (The latter stands for Velocity Robotic Autonomous Crawling Hexapod.)
The two robots achieve what they could not individually. "Successful trials for (I) single robot transition, (II) form connection, (III) connected climbing, (IV) release connection, and (V) tether-assisted climbing primitives are shown. When these independent primitives are performed sequentially, the robot team can climb a high-traction sandpaper step 6.5 cm in height, which is tall relative to their 10 cm body length."
Asked about further research goals on this, Casarez said in IEEE Spectrum: "I think there is some more interesting work in exploring how far two-robot cooperation can go. For example, instead of climbing a step, the robot with the winch could be used as an anchor for a tethered VelociRoACH that explores down an unknown chasm, which can then be retrieved after exploring."
Data-gathering applications in disaster areas come to mind. As Ackerman wrote, "Imagine sending a swarm of these little guys into, say, Fukushima to gather data about the environment inside: you know that half of them are going to get fried by radiation, and none of them are going to come back, but it just isn't that big of a deal, because they're essentially expendable."
More information:
robotics.eecs.berkeley.edu/~ro … Casarez_ICRA2016.pdf
robotics.eecs.berkeley.edu/~ronf/Biomimetics.html
© 2016 Tech Xplore




















