New soft robots really suck

EPFL scientists have created the first functional robot powered entirely by vacuum: made up of soft building blocks, it moves by having air sucked out of them. The robot can be reconfigured to perform different tasks, like climbing vertical walls and grabbing objects.
This new robot sucks: to move, air has to be sucked out of its individual components. Inspired by muscle contraction, its individual soft components are activated (they collapse) when negative pressure (vacuum) is applied to them. The robot uses suction to grab objects or to stick to a smooth wall for climbing, so it can really achieve a wide range of tasks because of the unique properties of vacuum. The robot can be reconfigured to perform different tasks, making it highly modular and versatile, with a wide range of applications in both research and in industry. The invention is published today in Science Robotics.
"What we have is a fully functional robot which is entirely powered by vacuum, which has never been done before," says EPFL roboticist Matt Robertson who worked on the project. "Previous work has shown individual components powered by vacuum, but never in a complete system."
Vacuum-powered components are a recent addition to robotics – and, more importantly, they're safe. Today, most actuators on the market are activated by applying positive pressure, i.e. by injecting air into their components. But containing positive pressure requires stiff high-pressure pneumatics, which also pose a safety threat: in extreme situations, they can explode. By comparison, vacuum-powered actuators are safe, soft, and simple to build.
"What's more is that our soft building blocks are designed to be plug-and-play, so ultimately we can assemble several types of robots from the same basic units," says EPFL scientists and lead researcher Jamie Paik. "They can be reconfigured to perform different tasks like crawling, gripping canisters, and climbing a vertical wall."
A five-module robot can move like a tentacle; a four-module robot with a suction gripper can grab an object and drop it on a target; a three-module robot can crawl on the ground; a two-module robot can be equipped with suction-cup feet to climb a smooth, vertical surface, like glass. The enormous versatility of the new robots can be exploited for studying locomotion and for future applications at an industrial level.
-
V-SPA robot tail-wagging and crawling up a wall. Credit: Robertson and Paik, Sci. Robot. 2, eaan6357 (2017) -
Rapid selective deflation of a V-SPA module. Credit: Robertson and Paik, Sci. Robot. 2, eaan6357 (2017) -
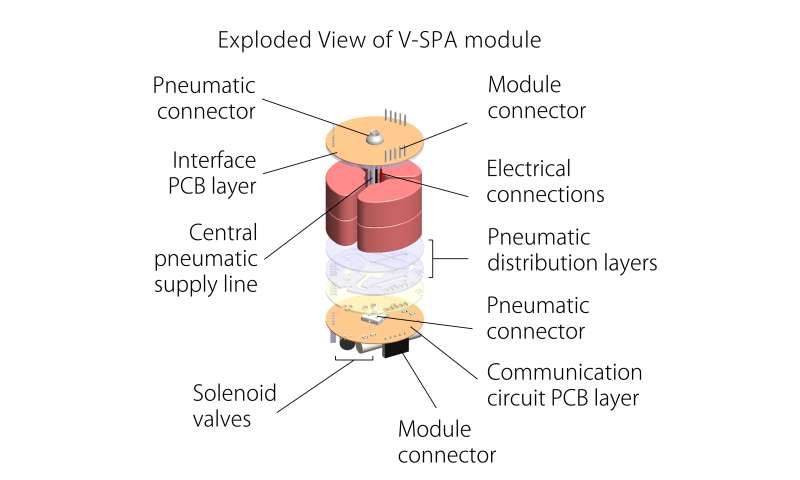
Architecture of the vacuum-powered soft pneumatic actuator (V-SPA) module. Credit: Robertson and Paik, Sci. Robot. 2, eaan6357 (2017) -
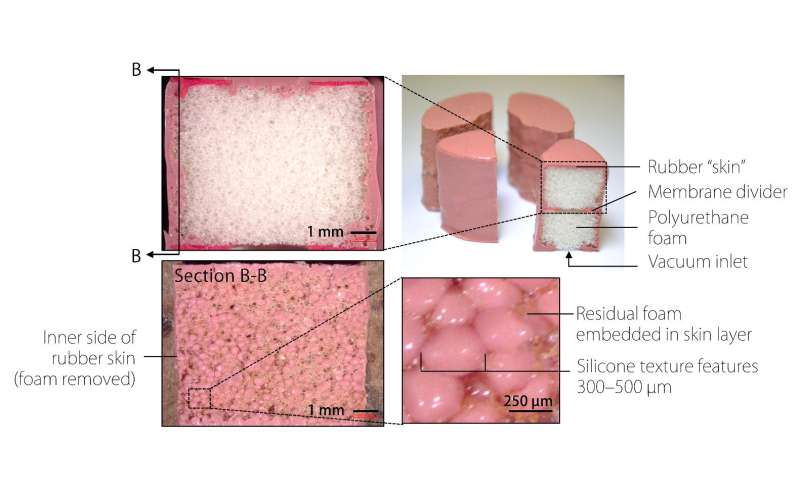
Anatomy of a vacuum-powered soft pneumatic actuator (V-SPA). Credit: Robertson and Paik, Sci. Robot. 2, eaan6357 (2017)
More information: Matthew A. Robertson et al. New soft robots really suck: Vacuum-powered systems empower diverse capabilities, Science Robotics (2017). DOI: 10.1126/scirobotics.aan6357




















