September 21, 2017 report
Remora robot able to adhere quickly and strongly to underwater objects
")
(Tech Xplore)—A team of researchers from China and the U.S. has created a robot that is able to mimic a remora fish by adhering quickly and strongly to underwater objects. In their paper published in the journal Science Robotics, the team describes the inspiration for their design, how it was made, and how well it works.
As scientists and engineers continue to push the boundaries of what is possible in creating useful robots, some have turned to mimicking living creatures that behave in unique and possibly useful ways. One such creature is the remora (aka, sucker fish). It has a fin on its head that has evolved to become a suction cup, allowing it to stick to other fish or sharks. In addition to allowing the fish to gain a free ride, it offers the fish a safe haven and food source (they eat dead skin off the host). In this new effort, the researchers have taken a very close look at how the sucker mechanism works and have used what they learned to create a robot with similar abilities.
The researchers found that the sucker fish suction disc was made of a soft material with rows of lamellae, a type of tissue. The lamellae in turn have spinules which can be manipulated by the sucker fish with surrounding muscles to allow for bending to fit the shape of a target host, such as a shark.
To mimic the suction disc, the researchers designed and printed a piece of rubber that was laser shaped to resemble the sucker fish suction disc. Then they affixed 1000 fiber spinules. To allow for movement of the spinules, the researchers added six air pouches that could be inflated or deflated on demand, causing the spinules to move like the original suction discs. The result was a suction disc attached to a small air pump that could be attached to a surface underwater by pressing against the object and manipulating the air pouches.
The team reports that the faux remora suction disc works as they had planned—it adheres to objects quickly and strongly underwater and can be detached just as easily. The team tested their robot by adhering it to a variety of underwater objects, including pieces of shark skin, an orange juice bottle and a silicone elastomer. They also found that it could hold on tightly—when adhering to a piece of smooth plexiglass, for example, it took a force of 436 newtons to remove it.
-
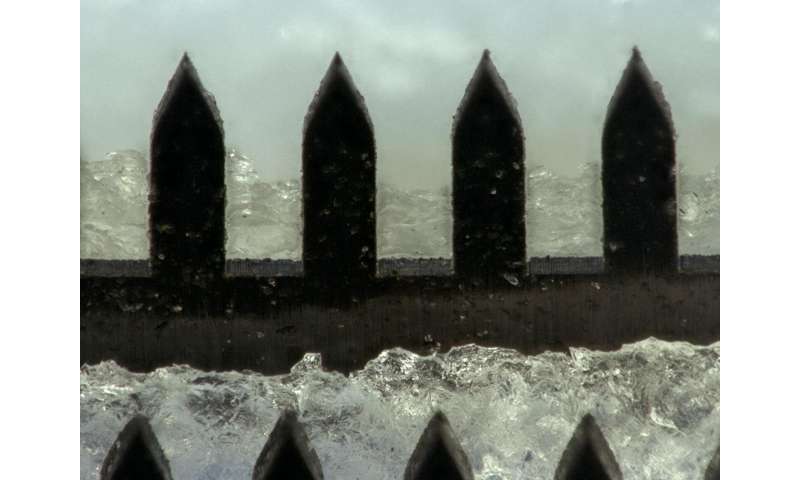
Extreme close-up of the carbon-fiber spinules on the artificial lamellae. Credit: Wang et al., Sci. Robot. 2, eaan8072 (2017) -
The bioinspired suction disc gripping wood in air. Credit: Wang et al., Sci. Robot. 2, eaan8072 (2017) -
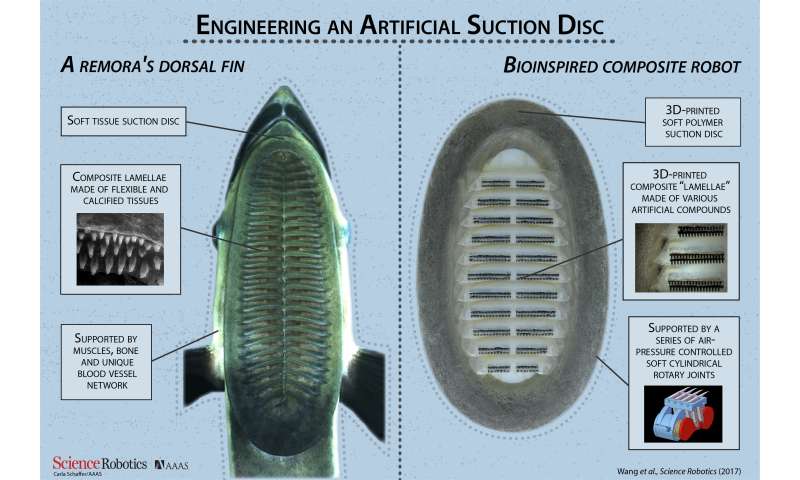
Side-by-side comparison of the bioinspiration (the remora sharksucker’s dorsal fin) and the biomimetic (the artificial suction disc). Credit: Carla Schaffer / AAAS
More information: Yueping Wang et al, A biorobotic adhesive disc for underwater hitchhiking inspired by the remora suckerfish, Science Robotics (2017). DOI: 10.1126/scirobotics.aan8072
Abstract
Remoras of the ray-finned fish family Echeneidae have the remarkable ability to attach to diverse marine animals using a highly modified dorsal fin that forms an adhesive disc, which enables hitchhiking on fast-swimming hosts despite high magnitudes of fluid shear. We present the design of a biologically analogous, multimaterial biomimetic remora disc based on detailed morphological and kinematic investigations of the slender sharksucker (Echeneis naucrates). We used multimaterial three-dimensional printing techniques to fabricate the main disc structure whose stiffness spans three orders of magnitude. To incorporate structures that mimic the functionality of the remora lamellae, we fabricated carbon fiber spinules (270 μm base diameter) using laser machining techniques and attached them to soft actuator–controlled lamellae. Our biomimetic prototype can attach to different surfaces and generate considerable pull-off force—up to 340 times the weight of the disc prototype. The rigid spinules and soft material overlaying the lamellae engage with the surface when rotated, just like the discs of live remoras. The biomimetic kinematics result in significantly enhanced frictional forces across the disc on substrates of different roughness. Using our prototype, we have designed an underwater robot capable of strong adhesion and hitchhiking on a variety of surfaces (including smooth, rough, and compliant surfaces, as well as shark skin). Our results demonstrate that there is promise for the development of high-performance bioinspired robotic systems that may be used in a number of applications based on an understanding of the adhesive mechanisms used by remoras.
© 2017 Tech Xplore



















