March 27, 2019 report
Microrobots that can form into multiple types of swarming shapes
A team of researchers from the Harbin Institute of Technology in China and Michigan State University in the U.S. has developed a way to control swarming microrobots that are able to form into multiple types of shapes. In their paper published in the journal Science Robotics, the group describes their tiny robots, what they can do, and possible uses for them.
Over the past several decades, scientists and engineers have been working toward the development of robots that are so tiny they can swim inside of a living body. It is believed that someday, such robots will be able to deliver drugs to targets in the body, or perhaps stay in the body, working in conjunction with the immune system to prevent diseases. In this new effort, the researchers have taken another step in that direction by developing a way to control a swarm of tiny robots that configures them into multiple types of shapes.
The researchers note that up until now, engineers have developed tiny robots that form and operate in swarms, but only in a single shape—limiting their usefulness. The researchers working in China report that their tiny robots were able to form into four different swarm shapes—liquid, ribbon, chain and vortex. And any one of them could be formed on demand.
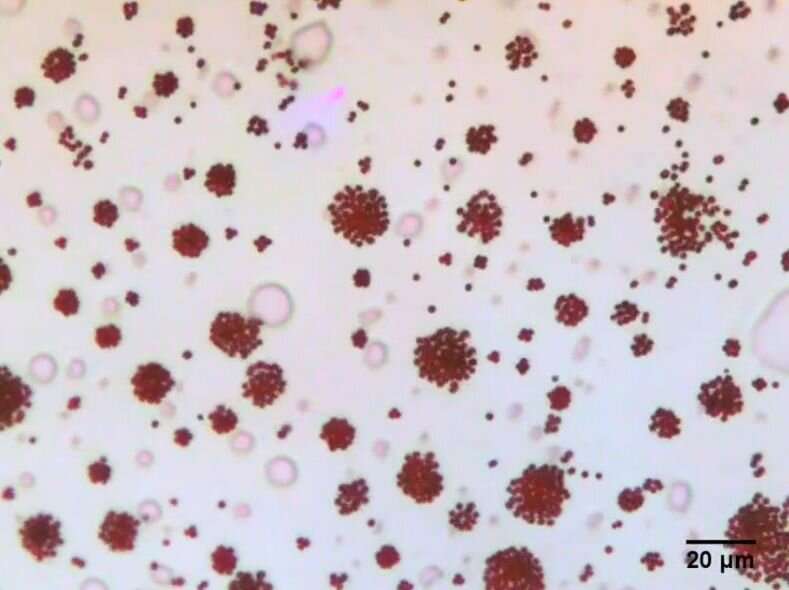
The robots in the experiments were actually just single grains of hematite—they were suspended in a liquid and manipulated using specialized magnets. By controlling the frequency and direction of the magnetic field, the researchers were able to get each robot to spin, roll, oscillate and tumble independently. When the magnetic field was controlled for a whole group of the robots, the result was a controllable swarm.
The researchers point out that to get from one body part to another, a swarm would need to be able to shape itself in different configurations. Moving through an organ such as the stomach, for example, might require a swarm simply to move as a mass. Moving through a channel, on the other hand, would require shapes like a chain, snake or worm. And moving cargo inside the body would require a swarm to band together in a shape such as a vortex for a collective hold.
More information: Hui Xie et al. Reconfigurable magnetic microrobot swarm: Multimode transformation, locomotion, and manipulation, Science Robotics (2019). DOI: 10.1126/scirobotics.aav8006
© 2019 Science X Network



















