August 18, 2020 feature
A biomimetic robotic finger created using 3-D printing

Humans are innately capable of performing complex movements with their hands via the articulation of their endoskeletal structure. These movements are made possible by ligaments and tendons that are elastically connected to a fairly rigid bone structure.
Researchers at University of California- Santa Cruz and Ritsumeikan University in Japan have recently designed and fabricated a robotic finger inspired by the human endoskeletal structure. This biomimetic robotic finger, presented at this year's International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), was assembled using a multi-material 3-D printer.
"Developing a robotic hand that has hard and soft components, just like the human hand, is a research topic that I wanted to explore for years," Maryam Tebyani, one of the researchers who carried out the study, told TechXplore. "Combining elastic and inelastic materials would address a prevalent gap in robotics, where flexible systems can have a hard time dealing with heavy objects while rigid platforms can require intricate fabrication or control to achieve dexterity comparable to the human hand."
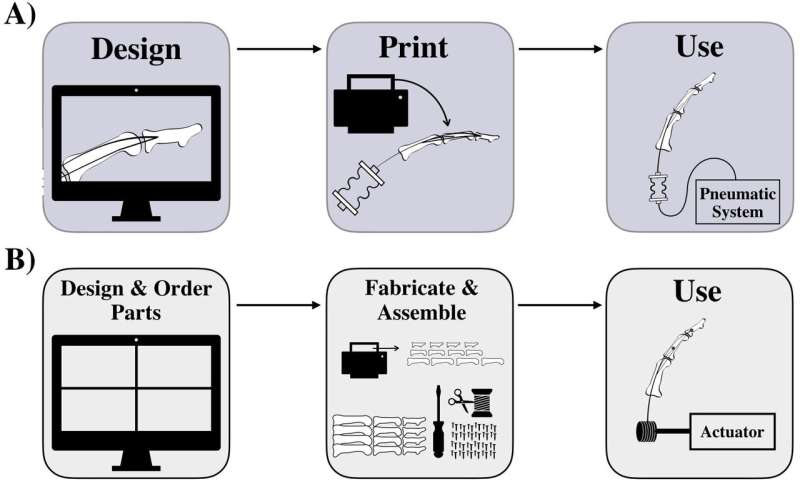
The primary objective of the recent work by Tebyani and her colleagues was to create a robotic hand inspired by natural systems. However, the researchers wanted to focus most of their efforts in designing the artificial hand, rather than in fabricating and assembling it. They thus decided to take advantage of state-of-the-art 3-D printing methods, which could simplify and accelerate the overall prototype production process.

"Leveraging multi-material 3-D printing in the design process gave us the freedom to design 3-dimensional tendon and ligament structures, while also allowing us to create a cable-driven robot in a single print," Tebyani explained. "Visco-elastic printing materials embedded the mechanical flexibility that we were looking for, as these allow for the production of really interesting passive behaviors. Essentially, this process enables the use of the mechanical design to program certain functions into the robot."
The robotic finger designed by the researchers has a bone geometry, ligament structures, artificial muscles and viscoelastic tendons that resemble that of humans. All of these components were synthesized as a single part using a multi-material 3-D printer. Tebyani and her colleagues also developed a model of the finger using a popular physics simulation engine called MuJoCo. This allowed them to compare the results achieved by their robotic finger in simulations with those achieved by a printed prototype of the finger in real world settings.

The results attained by the researchers in their experiments are highly promising, highlighting the huge potential of combining 3-D printing and simulation techniques to create complex robotics systems and gain greater control over these systems. The methods they used ultimately allowed them to merge the use of visco-elastic materials ubiquitous in soft robotics and more traditional robotics practices, which resulted in a closer reproduction of the human endoskeletal structure.
-

Credit: Tebyani et al. -
Credit: Tebyani et al.
"The design process we proposed allows us to scale the geometry and material properties of each element in our robotic designs to match individual humans and rapidly produce those prototypes through autonomous assembly," Tebyani said. "State-of-the-art prosthetics and tele-operated robotics have made exciting advancements in interfacing with human users. We're trying to aid this progress by designing platforms that are a natural extension of the human form and customizable models are integral in achieving this."
In the future, the design and fabrication process used by this team of researchers could be applied to the creation of several other bio-inspired robotic structures, such as other human or animal-inspired limbs. In addition, the biomimetic finger they developed could be used to develop a robotic hand, which could then be attached to both existing and new robots.

"We're currently working on extending this design to the entire hand and wrist, to enable object manipulation," Tebyani said. "We also have plans to develop designs that rely on a variation of the presented fabrication method so that these systems can be realized with 3-D printers that are more accessible to other roboticists."
More information: 3D printing an assembled biomimetic robotic finger. International Conference on Ubiquitous Robots and Ambient Intelligence (URAI) (2020). DOI: 10.1109/UR49135.2020.9144774
© 2020 Science X Network



















