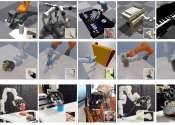
New scrubbing robot could contribute to automation of household chores
While the advent of robotic systems that can complete household chores has been widely anticipated, those commercially released so far are primarily robot vacuums that autonomously clean the floor. In contrast, robots that ...