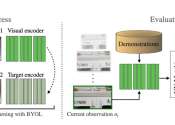
Teaching humanoid robots different locomotion behaviors using human demonstrations
In recent years, many research teams worldwide have been developing and evaluating techniques to enable different locomotion styles in legged robots. One way of training robots to walk like humans or animals is by having ...