February 22, 2016 weblog
Columbia team has research robot ironing cloth
Can a piece of cloth be properly ironed autonomously? Can a robot handle a regular iron and remove wrinkles?
That is what Columbia University researchers from the department of computer science, Yinxiao Li, Xiuhan Hu, Danfei Xu, Yonghao Yue, Eitan Grinspun and Peter Allen, set out to explore and test, and they reported results.
Their paper, "Multi-Sensor Surface Analysis for Robotic Ironing" will be presented in IEEE International Conference on Robotics and Automation (ICRA), Stockholm in May. Their paper is on arXiv.
Oh, and the answer to their question is yes, it is certainly possible, but it's no piece of cake.
"Robotic ironing is a very challenging task," they stated. "A full solution to the problem requires complex surface analysis, regrasping, and hybrid force/position control of the iron."
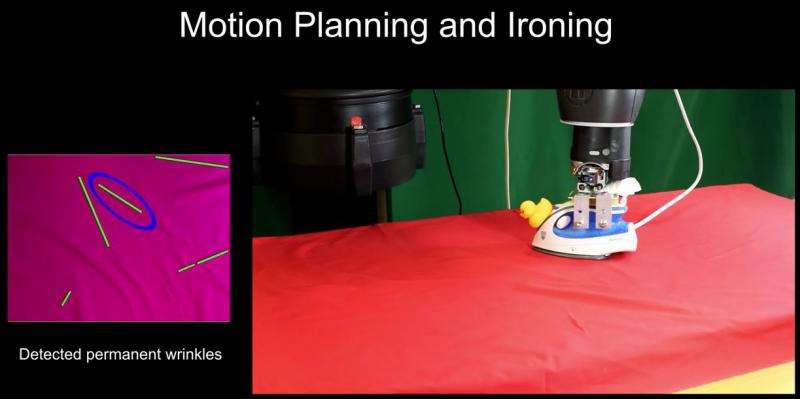
The video shows three robotic ironing scenarios. They included a piece of blue cloth, green garment and pieced of red cloth.
They turned to a Baxter research robot to implement the ironing; the robot is equipped with two arms with seven degrees of freedom to iron cloth; two lights detected surface discontinuities.
They worked with a "wrinkle analysis algorithm" and used a Kinect sensor for surface reconstruction.
More on their approach: the authors said they employed two types of visual scans to detect non-smooth and smooth regions. One was a curvature scan by a Kinect sensor which fuses multiple depth images to find height bumps—i.e., non-flat regions with smooth curvature. The other type was a discontinuity scan using diffuse reflection to find permanent wrinkles. (Combining results from the two scans, permanent wrinkles can be detected and represented as line segments.)
The results: the robot was able to iron the cloth surface and effectively remove the wrinkles.
Among the comments on the video: One viewer said robotic ironing should be a competition sport. Another suggested the programmer learn how to iron correctly.
On a serious note, Motherboard's Jordan Pearson made the point that a robotic ironing device for Christmas shopping lists is not the end goal here.
A mechanical butler to do your ironing is a pretty fun idea, he wrote, but "the real gains in the work done by the Columbia team come from the ability to handle floppy, unpredictable objects, which will have applications outside the laundromat."
Peter Allen, a professor of computer science at Columbia and paper co-author, was quoted in Motherboard:
"Basically, we're just saying that if you have an object that doesn't have a rigid set of states, you have to have a way to model it and deal with is, and what we were able to do is model these objects in a very nice way and figure it out,"
Allen added that food production would benefit from robots that can grasp soft objects on the fly, too.
More information: Multi-Sensor Surface Analysis for Robotic Ironing, arXiv:1602.04918 [cs.RO]
Abstract
Robotic manipulation of deformable objects remains a challenging task. One such task is to iron a piece of cloth autonomously. Given a roughly flattened cloth, the goal is to have an ironing plan that can iteratively apply a regular iron to remove all the major wrinkles by a robot. We present a novel solution to analyze the cloth surface by fusing two surface scan techniques: a curvature scan and a discontinuity scan. The curvature scan can estimate the height deviation of the cloth surface, while the discontinuity scan can effectively detect sharp surface features, such as wrinkles. We use this information to detect the regions that need to be pulled and extended before ironing, and the other regions where we want to detect wrinkles and apply ironing to remove the wrinkles. We demonstrate that our hybrid scan technique is able to capture and classify wrinkles over the surface robustly. Given detected wrinkles, we enable a robot to iron them using shape features. Experimental results show that using our wrinkle analysis algorithm, our robot is able to iron the cloth surface and effectively remove the wrinkles.
© 2016 Tech Xplore


















