February 22, 2019 feature
An approach for motion planning on asteroid surfaces with irregular gravity fields

Asteroids are small, rocky bodies orbiting the sun that are too small to be called planets. There are millions of asteroids in the solar system, ranging in size, shape and composition. The exploration of asteroids could help to uncover fascinating information about the origin of the solar system, of planet Earth, and of life itself.
Asteroids could also serve as strategic spots for planetary science, resource mining, communication relays or planetary defense. So far, however, exploring the surfaces of asteroids has proved to be very challenging due to their low and highly non-linear gravity field.
Recent asteroid missions, such as Hayabusa II and OSIRIS-Rex were merely fly-by or touch-and-go operations. Researchers have thus been trying to develop technology that would enable the exploration of asteroid surfaces, for instance, using in situ instruments to analyze their composition and sub-surface material.
Hopping robots could be particularly useful for the exploration of such surfaces, as mobility through ballistic hopping has several advantages in the presence of irregular gravity fields. These types of robots can traverse large distances over rough terrain, with limited energy expenditure. A team of researchers at the University of Arizona has recently developed ballistic hopping dynamics and a new approach for motion planning on asteroid surfaces.

"Unlike Earth, asteroid gravity is low, as such hopping rovers are more suited, as they can traverse large distances over arbitrarily rough terrain with the expenditure of little energy," Himangshu Kalita, one of the researchers who carried out the study, told TechXplore. "However, their irregular shape results in a highly irregular gravity field, which makes hopping highly uncertain. Thus, a sequential architecture for hopping rover autonomy is required that can plan ahead before executing any hop and simultaneously localize itself."
The approach devised by Kalita and his colleague Jekan Thanga calculates the velocity required to intercept a target and then localizes the hopping robot. To localize the robot, the researchers employed pose estimation methods based on successive scan matching using a 3-D laser scanner.
The information collected is subsequently used to plan the hopping robot's motion on the target asteroid's surface. The robot would need to perform multiple hops in order to reach a desired location on the asteroid, while also avoiding obstacles.

"The motion-planning architecture discussed in the paper can find near optimal trajectories for a hopping rover to reach a target location from its initial location on the surface of an asteroid with irregular gravity fields," Kalita explained. "Our approach uses a high-fidelity dynamics model to perform trial and error evaluation in simulation of candidate maneuvers to determine their suitability. The trial and error evaluation take into account risk, rewards and local uncertainties."
Many asteroids are rich in resources such as water, carbon-compounds, iron and platinum group metals. Some asteroids also contain remains of existing planets and could thus serve as 'time-capsules', providing pristine records of the early geology and geo-history of such planets. Exploring these asteroids could offer valuable insight into the origin of the solar system and planets contained with it. In the future, the approach devised by Thanga and Kalita could pave the way for the exploration of asteroid surfaces, leading to interesting observations and discoveries.
-
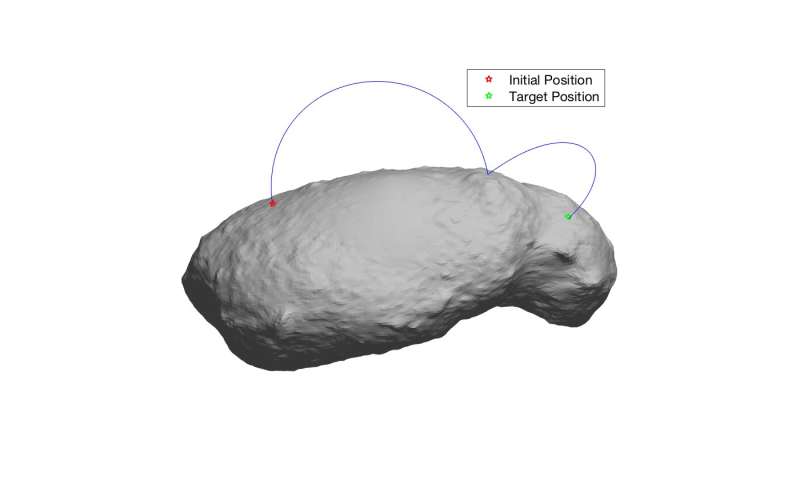
Optimal trajectory generated by the path planner to reach a target location. Credit: Kalita & Thangavelautham. -
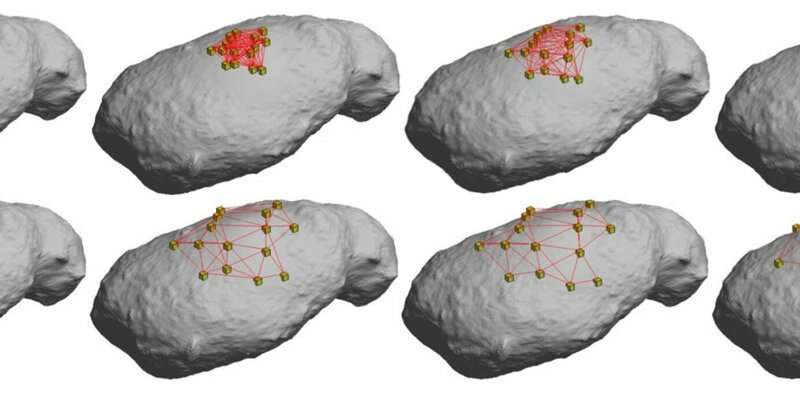
Multiple rovers exploring the surface of asteroid Itokawa cooperatively. Credit: Kalita & Thangavelautham. -
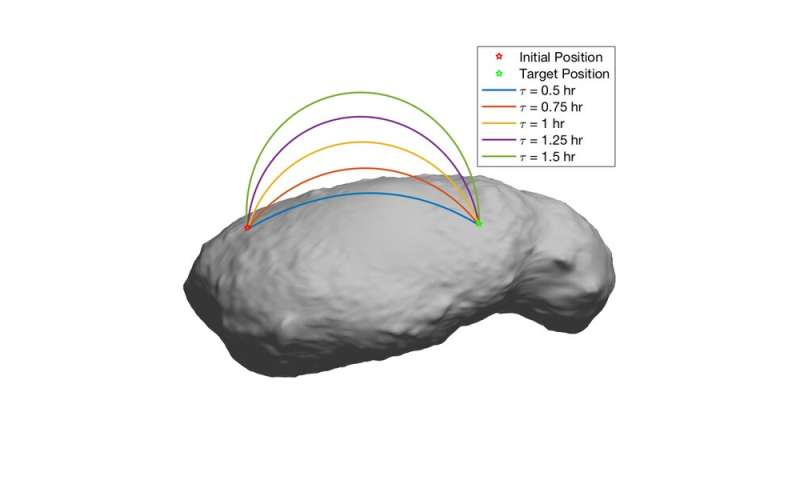
Hopping Trajectories from initial location to a target location on the surface of Itokawa. Credit: Kalita & Thangavelautham.
"Flyby and long-range observation of asteroids is insufficient to determine what is beneath the top layer of asteroids," Thanga said. "Our approach, which entails performing ballistic hopping for surface exploration of asteroids, can answer these questions. Moreover, the rovers deployed on asteroid surfaces to date rely on a mothership for localization, but their encounter in infrequent. Our simulations show that by using a 3-D mapping sensor onboard, the rovers can perform mothership-independent self-localization which is a precursor for rover autonomy."
The approach devised by Thanga and Kalita is designed to effectively plan the motion of a hopping robot over long distances, on asteroid surfaces with irregular gravity fields. The same approach could be applied to multiple coordinated robots that are simultaneously exploring a given asteroid's surface. The researchers have also extended their method in order to calculate several optimal trajectories, which would allow a robot to reach a desired goal while visiting multiple waypoints.
"We are now in the process of developing prototypes for miniaturized hopping rover that will use sublimate-based propellants for hopping," Kalita said. "With simulated irregular gravity fields, we will be able to test our approach to find hopping trajectories."
More information: Motion planning on an asteroid surface with irregular gravity fields. arXiv:1902.02065 [cs.RO]. arxiv.org/abs/1902.02065
© 2019 Science X Network



















